











Perundingan produk
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *


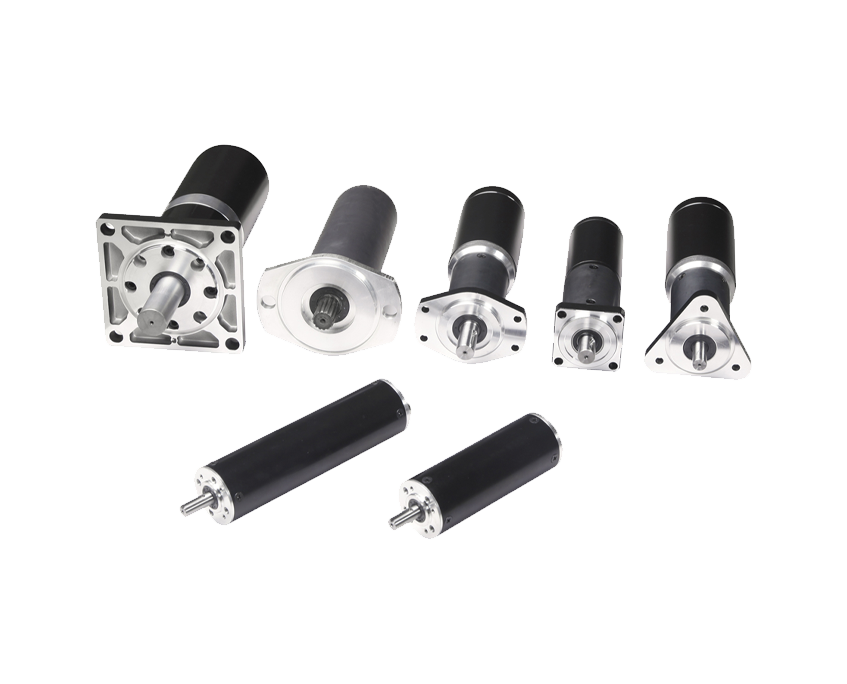
Motor stepper bergear ialah motor stepper yang digabungkan dengan kotak gear mekanikal — sama ada dibina terus ke dalam perumahan motor atau dipasang sebagai unit pengurangan diskret pada aci keluaran motor. Motor stepper itu sendiri ialah motor DC tanpa berus yang bergerak dalam kenaikan sudut yang tepat (langkah) setiap kali nadi semasa digunakan pada belitannya, menyediakan kawalan kedudukan gelung terbuka tanpa memerlukan pengekod atau peranti maklum balas. Kotak gear yang dipasang pada aci keluaran mendarabkan tork motor sambil mengurangkan kelajuan keluarannya secara berkadar dan — secara kritikal — mendarabkan resolusi sudutnya, supaya setiap langkah elektrik motor asas sepadan dengan putaran fizikal aci keluaran akhir yang lebih kecil.
Untuk memahami sebab gabungan ini sangat berguna, pertimbangkan motor pelangkah NEMA 17 standard dengan sudut langkah 1.8° (200 langkah setiap revolusi penuh). Pada operasi langkah penuh, kenaikan kedudukan terbaik yang boleh dihasilkan oleh motor ialah 1.8°. Pasangkan kotak gear 10:1 pada motor tersebut dan aci keluaran hanya bergerak 0.18° setiap langkah elektrik — resolusi kedudukan sepuluh kali lebih halus — sambil memberikan sepuluh kali ganda daya tahan dan tork dinamik motor yang tidak didengari (tolak kehilangan kecekapan kotak gear). Manfaat dwi tork yang lebih tinggi dan resolusi yang lebih halus daripada motor dan pemacu asas yang sama adalah yang terbaik motor stepper bergilir amat diperlukan dalam automasi ketepatan, robotik dan aplikasi instrumentasi di mana saiz padat, tork pegangan tinggi dan kedudukan yang tepat mesti wujud bersama.
Jenis kotak gear menentukan kecekapan, tindak balas, tahap hingar, kapasiti beban, dan faktor bentuk fizikal pemasangan motor stepper bergear lengkap. Tiga seni bina kotak gear digunakan dalam motor pelangkah komersil, setiap satu sesuai dengan keperluan aplikasi yang berbeza.
Kotak gear planet — dinamakan untuk susunan gearnya, di mana berbilang gear "planet" mengorbit gear "matahari" pusat dalam gear gelang - ialah jenis kotak gear yang dominan dalam aplikasi motor stepper bergear ketepatan. Beban dikongsi serentak merentas pelbagai gear planet dalam jaringan, mengagihkan tork yang dihantar merentasi jumlah kawasan sentuhan yang lebih besar daripada satu pasangan gear. Ini menghasilkan pemasangan yang sangat padat, berketumpatan tork tinggi dengan penjajaran sepaksi yang sangat baik antara aci input dan output, tindak balas yang rendah (biasanya 1–5 minit arka untuk gred ketepatan), dan kapasiti beban jejarian dan paksi yang tinggi berbanding dengan diameter kotak gear. Motor stepper bergear planet tersedia dalam saiz bingkai NEMA standard (NEMA 8, 11, 14, 17, 23, 34) dan dalam nisbah gear daripada 3.7:1 hingga lebih 100:1 melalui konfigurasi tunggal atau berbilang peringkat. Ia adalah pilihan pilihan untuk sistem CNC, robot kolaboratif, peranti perubatan, dan sebarang aplikasi penentududukan ketepatan di mana tindak balas dan kapasiti beban adalah kritikal.
Kotak gear taji menggunakan satu siri gear silinder luaran dengan gigi potong lurus yang disusun dalam kereta api gear ringkas. Setiap pasangan gear dalam kereta api menyediakan peringkat pengurangan kelajuan dan pendaraban tork. Motor stepper bergear taji adalah lebih ringkas dan lebih murah untuk dikeluarkan berbanding versi planet, menjadikannya popular untuk aplikasi sensitif kos di mana beberapa tindak balas boleh diterima dan beban jejarian pada aci keluaran adalah sederhana. Pemasangan motor stepper gear taji biasa mempunyai tindak balas yang lebih tinggi daripada setara planet (biasanya 3–10° pada aci keluaran, bergantung pada bilangan peringkat dan kualiti pembuatan) dan transmisi tork yang kurang cekap disebabkan oleh sentuhan gelongsor antara gigi gear potong lurus. Ia amat sesuai untuk aplikasi seperti pengaktifan injap, mekanisme suapan mudah, dan automasi tugas ringan di mana kos diutamakan berbanding ketepatan mutlak.
Kotak gear cacing menggunakan skru cacing heliks (input) bersirat dengan roda cacing (output) untuk mencapai pengurangan kelajuan yang besar dalam satu peringkat padat. Motor stepper gear cacing boleh mencapai nisbah pengurangan 5:1 hingga 100:1 dalam satu peringkat dan menghasilkan offset 90 darjah antara paksi aci input dan output — kelebihan fizikal dalam aplikasi yang memerlukan pemacu sudut kanan. Sifat paling tersendiri bagi motor stepper gear cacing ialah mengunci sendiri: di atas nisbah gear tertentu (biasanya melebihi 20:1), gear cacing tidak boleh didorong ke belakang oleh beban, bermakna aci keluaran memegang kedudukannya secara mekanikal tanpa sebarang arus pegangan elektrik. Ini menjadikan motor stepper geared worm berharga untuk aplikasi seperti pagar bermotor, mekanisme mengangkat dan platform condong yang kehilangan kuasa tidak boleh menyebabkan pergerakan tidak terkawal. Had ketara ialah kecekapan — kehilangan geseran gear cacing adalah tinggi (biasanya kecekapan 40–80% berbanding 90–97% untuk kotak gear planet), mengehadkan motor stepper gear cacing kepada aplikasi tugas yang lebih rendah di mana penjanaan haba dan penggunaan tenaga bukanlah kebimbangan kritikal.
Jadual di bawah meringkaskan perbezaan prestasi utama antara tiga jenis kotak gear utama yang digunakan dalam pemasangan motor stepper bergear untuk membantu dalam pemilihan awal.
| Kriteria | Planetari | Spur | cacing |
| Tindak balas biasa | 1–5 arcmin (ketepatan) | 3–10° (berbilang peringkat) | Rendah–sederhana |
| Kecekapan | 90–97% | 85–95% | 40–80% |
| Ketumpatan tork | Sangat tinggi | Sederhana | Sederhana |
| Kebolehpandu belakang | ya | ya | Mengunci sendiri (nisbah tinggi) |
| Orientasi aci | sepaksi (dalam talian) | Koaksial atau offset | 90° sudut tepat |
| Tahap bunyi bising | rendah | Sederhana | Rendah–sederhana |
| Kos relatif | Sederhana–Tinggi | rendah–Medium | rendah–Medium |
| Kes penggunaan terbaik | Kedudukan ketepatan, robotik | Automasi sensitif kos | Pemanduan sudut kanan, mengunci diri |
Nisbah gear bagi motor stepper bergear ialah spesifikasi tunggal yang paling berpengaruh untuk menentukan sama ada pemasangan tertentu akan memenuhi keperluan aplikasi. Memahami dengan tepat apa yang dilakukan oleh nisbah gear — dan tidak — perubahan tentang tingkah laku sistem motor adalah penting untuk pemilihan yang betul dan reka bentuk sistem.
Nisbah gear N ditakrifkan sebagai bilangan pusingan aci input yang diperlukan untuk menghasilkan satu pusingan aci keluaran. Nisbah gear 10:1 bermakna aci motor melengkapkan sepuluh putaran penuh untuk setiap satu putaran aci keluaran kotak gear. Kesan penggandaan tork adalah mudah: tork output sama dengan tork input motor didarab dengan nisbah gear dan didarab dengan kecekapan kotak gear (η). Untuk motor yang menghantar 0.5 Nm pada acinya yang disambungkan ke kotak gear planet 10:1 dengan kecekapan 95%, tork keluaran ialah 0.5 × 10 × 0.95 = 4.75 Nm. Sebaliknya, kelajuan aci keluaran ialah kelajuan motor dibahagikan dengan nisbah gear — motor yang berjalan pada 600 RPM melalui kotak gear 10:1 menyampaikan 60 RPM pada output. Hubungan songsang antara tork dan kelajuan ini ialah pertukaran mekanikal asas yang diuruskan oleh nisbah gear.
Motor pelangkah standard 1.8° setiap langkah melengkapkan satu revolusi dalam 200 langkah penuh. Melalui kotak gear 10:1, aci keluaran berputar 0.18° setiap langkah penuh, memerlukan 2,000 langkah bagi setiap revolusi aci keluaran. Melalui kotak gear 50:1, setiap langkah menggerakkan aci keluaran hanya 0.036°, dan 10,000 langkah diperlukan setiap revolusi. Peningkatan dramatik dalam resolusi sudut ini bermakna kedudukan yang sangat halus — seperti mengawal fokus objektif mikroskop, melaraskan sudut antena, atau mengindeks meja putar — boleh dicapai dengan perkakasan motor stepper standard dan pemacu langkah dan arah yang mudah, tanpa memerlukan maklum balas servo mikrostepping atau mahal. Pendaraban resolusi ialah salah satu sifat paling praktikal bernilai bagi motor stepper bergilir dan selalunya merupakan sebab utama untuk memilih motor bergear berbanding alternatif pemacu terus.
Kotak gear mengurangkan inersia pantulan beban seperti yang dilihat oleh motor dengan faktor yang sama dengan kuasa dua nisbah gear. Beban dengan momen inersia 100 kg·cm² yang dipantulkan melalui kotak gear 10:1 kelihatan kepada motor sebagai hanya 1 kg·cm² (100 / 10²). Pengurangan inersia ini adalah penting untuk mencapai prestasi dinamik yang optimum — motor stepper paling responsif dan paling tidak terdedah kepada terhenti apabila inersia beban yang mesti dipercepatkan adalah hampir dengan inersia pemutar motor sendiri (prinsip reka bentuk "padanan inersia"). Dengan memasukkan kotak gear yang sesuai, pelbagai inersia beban dunia sebenar boleh dibawa ke dalam julat padanan optimum untuk motor stepper tertentu, memaksimumkan keupayaan pecutan dan ketepatan mengikut langkah.
Memilih motor stepper bergear memerlukan penilaian satu set spesifikasi saling bergantung yang secara kolektif menentukan sama ada pemasangan akan berfungsi dengan betul dalam aplikasi sasaran. Memfokuskan pada hanya satu atau dua parameter — seperti tork dan nisbah gear — sambil mengabaikan yang lain seperti tindak balas, kelajuan aci keluaran maksimum atau beban jejarian yang dibenarkan membawa kepada ralat pemilihan yang ditemui hanya selepas prototaip atau penggunaan mahal.

Motor stepper bergear digunakan merentasi rangkaian aplikasi automasi, robotik, perubatan dan instrumentasi yang sangat luas. Gabungan kawalan kedudukan gelung terbuka yang tepat, tork keluaran tinggi, faktor bentuk padat, dan elektronik kawalan mudah menjadikannya sangat sesuai dengan set profil aplikasi berulang.
Motor stepper terarah planet digunakan dalam sambungan robot pendidikan, lengan robot kolaboratif kecil, manipulator robot desktop dan platform artikulasi gred hobi. Nisbah tork-kepada-saiz yang tinggi bagi pelangkah NEMA 17 atau NEMA 23 yang digiatkan planet membolehkannya menyokong dan menggerakkan segmen lengan melawan graviti sambil mengekalkan kedudukan tanpa arus berterusan dalam pegangan statik (dengan arus pegangan yang sesuai). Penghapusan penderia maklum balas dan pendawaian, antara muka dan penalaan yang berkaitan mengurangkan kerumitan sistem berbanding alternatif berasaskan servo dalam aplikasi yang memerlukan kelajuan dan ketepatan mutlak adalah sederhana. Banyak kit lengan robot yang popular menggunakan motor stepper NEMA 17 dengan kotak gear planet 5:1 atau 10:1 pada sendi bahu dan siku untuk alasan ini.
Meja putar CNC untuk pengilangan dan pengisaran menggunakan motor stepper bergilir planet nisbah tinggi untuk mencapai resolusi sudut dan tork pegangan yang diperlukan untuk pengindeksan bahagian yang tepat dan kontur paksi berputar berterusan. Paksi putar A dan B pusat pemesinan CNC 5 paksi biasanya digerakkan oleh himpunan stepper bergear hibrid cacing-planet dengan nisbah gear 90:1 hingga 180:1, memberikan resolusi sudut aras kedua arka dan tork yang mencukupi untuk menahan daya pemotongan tanpa gelincir. Sifat mengunci sendiri kotak gear cacing nisbah tinggi juga bernilai di sini, kerana ia menghalang paksi putar paksi berputar apabila daya pemotongan dikenakan semasa pemesinan.
Pam pendispensan cecair ketepatan, pemacu picagari, pam peristaltik, peringkat mikroskop bermotor, dan sistem pemipetan automatik semuanya bergantung pada motor stepper bergilir untuk gabungan dos yang tepat atau kawalan kedudukan, saiz padat dan operasi gelung terbuka yang boleh dipercayai tanpa kerumitan maklum balas. Aplikasi perubatan memerlukan motor stepper bergilir dengan bahan serasi bilik bersih, penjanaan zarah rendah, dan dalam kebanyakan kes bahan perumahan biokompatibel atau boleh disterilkan. Stepper bergiat planet tindak balas rendah dalam saiz bingkai NEMA 8 dan NEMA 11 ialah pilihan yang dominan untuk instrumentasi perubatan dan makmal yang kompak di mana ruang sangat terhad dan ketepatan kedudukan beberapa mikrometer perjalanan linear (dicapai melalui skru utama nada halus yang digandingkan dengan output stepper bergilir) diperlukan.
Injap bebola bermotor, injap rama-rama dan penggerak peredam HVAC menggunakan motor stepper bergilir untuk memacu elemen injap ke kedudukan sudut yang tepat sebagai tindak balas kepada automasi bangunan atau isyarat kawalan proses. Tork keluaran yang tinggi bagi motor pelangkah bergear — selalunya 5–50 Nm untuk aplikasi penggerak injap — mengatasi kuasa tempat duduk dan unseating dalam injap proses, manakala keupayaan pegang kendiri stepper bertenaga (atau penguncian kendiri mekanikal bagi varian gear cacing nisbah tinggi) mengekalkan kedudukan injap terhadap tekanan bendalir tanpa penggunaan kuasa berterusan. Antara muka kawalan langkah dan arah yang mudah disepadukan dengan mudah dengan output PLC dan sistem pengurusan bangunan (BMS).
Walaupun motor stepper NEMA 17 standard mengendalikan kebanyakan paksi dalam pencetak 3D FDM, motor stepper bergilir — terutamanya yang mempunyai kotak gear planet nisbah 3:1 hingga 5:1 — semakin banyak digunakan dalam mekanisme pemacu penyemperit. Stepper extruder bergilir memberikan daya cengkaman yang lebih tinggi pada filamen, kawalan penarikan balik yang lebih baik untuk rentetan yang dikurangkan, dan penyemperitan yang lebih konsisten pada kedua-dua kadar aliran rendah dan tinggi berbanding dengan motor tanpa pendengaran pemacu langsung dengan saiz bingkai yang sama. Reka bentuk penyemperit Orbiter dan Sherpa yang popular dalam komuniti FDM menggunakan motor NEMA 14 padat planet bergear tersuai atau NEMA 17 khusus untuk mencapai peningkatan prestasi penyemperit ini dalam pakej yang ringan dan boleh dipasang kepala cetak.
Kotak gear dalam motor stepper bergear adalah komponen mekanikal semata-mata — ia tidak mempunyai antara muka elektrik dan tidak memerlukan perubahan pada litar pemacu motor stepper asas. Pemandu menyambung ke belitan motor stepper dengan cara yang sama seperti untuk motor yang tidak didengar, dan isyarat langkah dan arah yang sama mengawal kedua-duanya. Walau bagaimanapun, kotak gear memperkenalkan beberapa pertimbangan kawalan praktikal yang mesti diambil kira dalam reka bentuk sistem gerakan dan konfigurasi pemandu.
Oleh kerana kotak gear mendarabkan langkah-setiap-putaran pada aci keluaran dengan nisbah gear, pengawal gerakan mesti mengambil kira perkara ini apabila menterjemah halaju atau kedudukan aci keluaran yang dikehendaki ke dalam arahan langkah motor. Jika aplikasi memerlukan aci keluaran berputar pada 30 RPM melalui kotak gear 10:1, motor mesti berputar pada 300 RPM, memerlukan kadar langkah 300 × 200 = 60,000 langkah seminit (1,000 langkah sesaat) pada langkah penuh, atau kadar langkah yang lebih tinggi secara berkadar untuk microstepping. Kebanyakan pengawal motor stepper membenarkan kemasukan angka langkah-per-revolusi sistem — yang sepatutnya merupakan kiraan langkah penuh motor didarab dengan nisbah gear dan faktor mikrostepping — supaya semua kedudukan dan halaju yang diperintahkan ditentukan secara langsung dalam terma aci keluaran.
Motor stepper bergear sering digunakan dalam aplikasi yang memerlukan tork pegangan tinggi yang berterusan pada kelajuan keluaran yang rendah, yang bermaksud motor mungkin ditenagakan pada arus undian penuh untuk tempoh yang lama. Tidak seperti motor servo, yang menarik arus mengikut perkadaran dengan beban, motor stepper menarik arus fasa penuh secara berterusan sama ada ia bergerak atau berdiri diam di bawah beban. Ini mengakibatkan penjanaan haba berterusan dalam belitan motor yang mesti diuruskan dengan pengudaraan atau perendaman haba yang mencukupi. Banyak pemandu motor stepper menyertakan ciri pengurangan arus automatik (biasanya mengurangkan arus kepada 50–70% arus larian apabila motor tidak bergerak selama 100–500 ms) yang mengurangkan penjanaan haba siap sedia dengan ketara dan amat disyorkan untuk aplikasi motor stepper bergear di mana kotak gear menyediakan pegangan mekanikal yang mencukupi tanpa arus pegangan elektrik penuh.
Motor stepper mempamerkan resonans frekuensi pertengahan — julat kelajuan di mana frekuensi ayunan semula jadi motor bertepatan dengan frekuensi pengujaan langkah, menyebabkan getaran, bunyi dan potensi kehilangan langkah. Kotak gear mengasingkan sebahagian beban daripada resonans motor dengan bertindak sebagai penapis laluan rendah mekanikal: pematuhan jaringan gear dan pelicinan inersia daripada peringkat gear melemahkan tork langkah impulsif sebelum ia mencapai aci keluaran. Ini bermakna motor stepper bergilir selalunya berjalan dengan lebih lancar pada kelajuan terdedah resonans berbanding motor tanpa telinga yang setara yang memacu beban yang sama, yang merupakan faedah praktikal tambahan melebihi kelebihan tork dan resolusi utama. Menggunakan microstepping (mod 1/8, 1/16, atau 1/32 step) pada tahap pemandu mengurangkan lagi getaran dan hingar motor dan disyorkan untuk semua aplikasi motor stepper bergear ketepatan.
Keputusan untuk menggunakan motor stepper bergilir berbanding motor stepper pemacu terus — atau memang berbanding motor servo bergilir — hendaklah berdasarkan analisis yang jelas tentang tork, kelajuan, resolusi, ketepatan dan keperluan kos aplikasi dan bukannya kebiasaan atau kebiasaan komponen. Setiap pendekatan mempunyai prestasi tulen dan profil kos yang menggemarinya dalam senario tertentu.
Motor stepper bergear biasanya merupakan peranti penyelenggaraan rendah apabila dinyatakan dan dikendalikan dengan betul dalam parameter undiannya. Motor stepper itu sendiri ialah reka bentuk tanpa berus tanpa haus komutator, dan galas bebola dalam kedua-dua motor dan kotak gear direka untuk hayat perkhidmatan yang panjang di bawah keadaan pemuatan biasa. Walau bagaimanapun, pertimbangan penyelenggaraan tertentu dikenakan sepanjang hayat operasi pemasangan.
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *
Hak cipta © Zhejiang Dongzheng Motor Co., Ltd. Semua hak terpelihara.
 Pengilang Motor Gear DC
Pengilang Motor Gear DC