











Perundingan produk
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *


Motor DC berus adalah salah satu reka bentuk motor elektrik tertua dan paling mudah yang masih digunakan secara meluas hari ini. Ia menukarkan tenaga elektrik arus terus kepada putaran mekanikal menggunakan gabungan medan magnet pegun dan belitan angker berputar. Apa yang membezakannya daripada motor tanpa berus ialah sistem penukaran mekanikal — sepasang berus karbon yang menekan pada gelang komutator kuprum bersegmen yang dipasang pada aci pemutar. Apabila rotor berputar, berus membuat dan memutuskan hubungan dengan segmen komutator berturut-turut, secara automatik menukar arah semasa dalam belitan angker untuk mengekalkan putaran berterusan dalam satu arah.
Prinsip operasi adalah mudah: arus mengalir dari bekalan kuasa melalui satu berus, ke dalam komutator, melalui belitan angker, keluar melalui komutator ke berus kedua, dan kembali ke bekalan. Konduktor pembawa arus dalam angker berada di dalam medan magnet yang dihasilkan sama ada oleh magnet kekal atau oleh gegelung medan luka. Interaksi antara medan magnet ini dan arus dalam konduktor angker menghasilkan daya - diterangkan oleh undang-undang daya Lorentz - yang memutarkan angker. Komutator memastikan bahawa semasa angker berputar, arah arus dalam setiap belitan berbalik pada saat yang tepat untuk memastikan tork bertindak secara berterusan dalam arah putaran yang sama.
Reka bentuk tukar kendiri ini bermakna motor DC berus hanya memerlukan bekalan DC dan tiada elektronik luaran untuk dijalankan. Guna voltan dan ia berputar. Terbalikkan kekutuban dan ia berputar ke arah lain. Kesederhanaan ini telah memastikan motor berus tetap relevan selama lebih satu abad, walaupun teknologi motor tanpa berus dan AC telah matang.
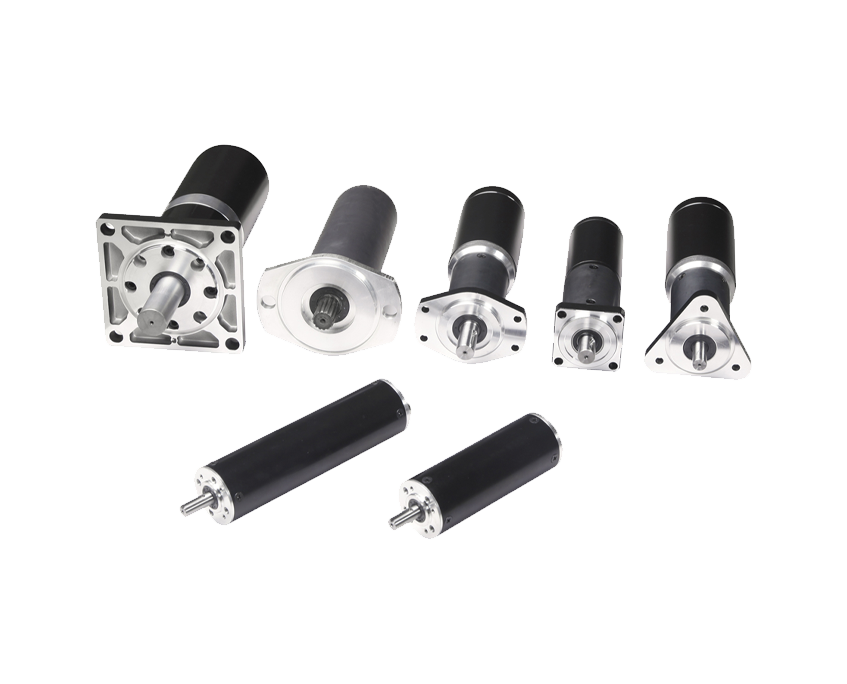
Motor DC berus bukan satu produk — ia adalah satu keluarga reka bentuk dengan ciri-ciri tork kelajuan yang berbeza secara bermakna bergantung pada cara medan magnet dijana dan cara medan dan litar angker disambungkan.
Jenis yang paling biasa dalam aplikasi kuasa kecil dan sederhana, motor DC magnet kekal menggunakan magnet tetap - biasanya ferit atau neodymium nadir bumi - untuk mencipta medan stator dan bukannya gegelung luka. Oleh kerana tiada penggulungan medan yang berasingan kepada kuasa atau kawalan, motor PMDC adalah padat, cekap, dan mempunyai hubungan kelajuan-torsi linear: kelajuan menurun secara berkadar apabila tork meningkat, menjadikannya mudah untuk dimodelkan dan dikawal. Ia adalah pilihan standard untuk alatan berkuasa bateri, penggerak automotif, peralatan kecil dan aplikasi hobi dalam julat 3V–48V. Had utama ialah kekuatan medan magnet ditetapkan oleh magnet dan tidak boleh dilaraskan, jadi kawalan kelajuan mesti dicapai melalui voltan angker atau PWM dan bukannya melemahkan medan.
Dalam motor DC luka bersiri, belitan medan disambung secara bersiri dengan angker, jadi arus yang sama mengalir melalui kedua-duanya. Ini menghasilkan tork permulaan yang sangat tinggi - medan paling kuat apabila arus angker tertinggi, yang berlaku pada kelajuan rendah dan gerai - menjadikan motor siri sesuai untuk aplikasi dengan beban permulaan yang berat seperti kren elektrik, pacu daya tarikan dan motor pemula dalam enjin pembakaran dalaman. Kelemahannya ialah peraturan kelajuan yang tidak stabil: apabila beban berkurangan, arus menurun, medan menjadi lemah, dan kelajuan meningkat dengan mendadak. Motor siri yang bermuatan ringan atau memunggah boleh menjadi lebih laju dengan berbahaya. Atas sebab ini, motor DC berus luka siri hampir tidak pernah digunakan dalam aplikasi di mana beban boleh dikeluarkan sepenuhnya semasa operasi.
Motor luka shunt menyambungkan belitan medan secara selari (shunt) dengan angker merentasi voltan bekalan. Oleh kerana arus medan hanya bergantung pada voltan bekalan — bukan arus beban — medan kekal hampir malar tanpa mengira beban angker. Ini memberikan motor shunt pengawalan kelajuan yang sangat baik: kelajuan kekal agak rata apabila beban meningkat, biasanya berbeza-beza hanya 5–15% daripada tanpa beban kepada beban penuh. Motor DC berus luka shunt digunakan dalam alatan mesin, mesin cetak dan pemacu industri di mana kelajuan yang konsisten di bawah beban yang berbeza-beza adalah penting. Mereka juga membenarkan kelemahan medan untuk operasi kelajuan di atas asas dengan mengurangkan arus medan, memanjangkan julat kelajuan yang boleh digunakan.
Motor luka kompaun menggabungkan kedua-dua belitan medan siri dan shunt. Konfigurasi kompaun terkumpul — di mana kedua-dua belitan menghasilkan medan dalam arah yang sama — memberikan kompromi antara tork permulaan yang tinggi bagi motor siri dan peraturan kelajuan stabil motor shunt. Ini menjadikan motor kompaun sangat sesuai untuk aplikasi dengan pancang beban yang besar dan terputus-putus seperti penekan, lif dan pemampat, di mana motor mesti mengendalikan beban berat secara tiba-tiba tanpa penurunan kelajuan yang berlebihan. Penggulungan kompaun pembezaan (arah medan bertentangan) jarang digunakan dalam amalan kerana ciri pengendalian yang tidak stabil.
Motor DC tanpa teras menghilangkan teras besi daripada pemutar, menggantikannya dengan belitan silinder sokongan sendiri yang berputar di dalam medan magnet stator. Mengeluarkan teras besi menghapuskan kehilangan besi (histeresis dan kehilangan arus pusar) dan secara mendadak mengurangkan inersia rotor. Hasilnya ialah tindak balas elektrik dan mekanikal yang sangat pantas — motor DC berus tanpa teras boleh memecut ke kelajuan penuh dalam milisaat dan bukannya berpuluh-puluh milisaat — bersama-sama dengan putaran yang sangat lancar dan bebas cogging pada kelajuan rendah. Ciri-ciri ini menjadikan motor tanpa teras sebagai pilihan utama untuk aplikasi ketepatan: peranti perubatan, penggerak aeroangkasa, pemacu lensa kamera, plotter pen dan alat tangan pergigian berkelajuan tinggi. Ia biasanya kecil dalam saiz fizikal dan beroperasi dalam julat 3V–24V, dengan output kuasa jarang melebihi beberapa ratus watt.
Membaca lembaran data motor DC yang disikat dengan yakin memerlukan pemahaman tentang maksud setiap parameter dalam amalan — dan perkara yang berlaku apabila anda beroperasi di luar hadnya.
| Spesifikasi | Maksudnya | Nota Praktikal |
| Voltan Ternilai | Voltan bekalan nominal untuk operasi berterusan | Pengendalian voltan terkadar di atas memendekkan hayat berus dan penebat |
| Kelajuan Tanpa Beban | RPM pada voltan terkadar dengan tork sifar digunakan | Kelajuan operasi sebenar akan menjadi 10–30% lebih rendah di bawah beban |
| Tork Gerai | Tork maksimum apabila aci dipegang pegun | Jangan sekali-kali beroperasi secara berterusan di gerai — menyebabkan terlalu panas yang cepat |
| Tork Berkadar (Berterusan). | Tork maksimum untuk operasi berterusan tanpa had | Tambahkan margin keselamatan 20–30% untuk geseran dan penuaan dunia sebenar |
| Arus Tanpa Beban | Cabutan arus pada voltan terkadar tanpa beban | Dikuasai oleh geseran galas dan kehilangan geseran berus |
| Arus Gerai | Arus pada kelajuan sifar — cabutan arus maksimum yang mungkin | Bekalan kuasa saiz dan pemandu untuk mengendalikan arus gerai secara sementara |
| Pemalar Motor (Km) | Tork per unit kuasa input — ukuran kecekapan | Km lebih tinggi = lebih tork untuk kerugian belitan yang sama |
| Pemalar EMF Belakang (Ke) | Voltan dijana setiap unit kelajuan (V/RPM atau V·s/rad) | Secara berangka sama dengan pemalar tork Kt dalam unit konsisten |
| Rintangan Terma | Kenaikan suhu setiap watt kuasa yang hilang (°C/W) | Gunakan untuk mengira suhu penggulungan pada titik operasi anda |
Keluk tork kelajuan ialah satu-satunya alat yang paling berguna untuk memahami sampul operasi motor DC yang disikat. Untuk motor berus magnet kekal, lengkung ini adalah garis lurus daripada kelajuan tanpa beban (kelajuan maksimum, tork sifar) ke gerai (kelajuan sifar, tork maksimum). Titik operasi berterusan dinilai motor terletak di suatu tempat di sepanjang garisan ini, dikekang oleh had haba. Mana-mana titik operasi di luar garisan penarafan berterusan dibenarkan hanya sekali-sekala, untuk tempoh yang cukup singkat sehingga suhu penggulungan tidak melebihi had kelas penebat — biasanya 130°C untuk penebat Kelas B dan 155°C untuk Kelas F.
Pilihan antara berus dan tanpa berus adalah salah satu keputusan yang paling biasa dalam pemilihan motor. Setiap teknologi mempunyai rumah yang tulen — kedua-duanya tidak unggul secara universal.
| Faktor | Motor DC Berus | Motor DC tanpa berus (BLDC) |
| Kerumitan Kawalan | Mudah — voltan langsung atau PWM | Memerlukan pemacu pertukaran elektronik/ESC |
| Hayat Perkhidmatan | 500–3,000 jam (terhad berus) | 10,000–20,000 jam |
| Kecekapan | 75–85% tipikal | 85–95% tipikal |
| Generasi EMI | Lebih tinggi (berus arka) | Lebih rendah |
| Kos Unit | Lebih rendah motor cost | Kos pemandu motor yang lebih tinggi |
| Julat Kelajuan | Baik, had sentuhan berus RPM yang sangat tinggi | Cemerlang, tiada had sentuhan mekanikal |
| Penyelenggaraan | Pemeriksaan/penggantian berus berkala | Pada asasnya tanpa penyelenggaraan |
| Terbaik Untuk | Sensitif kos, terputus-putus, kawalan mudah | Tahan lama, kecekapan tinggi, kawalan ketepatan |
Pilih motor DC berus apabila kos pendahuluan dan kesederhanaan kawalan mengatasi kebimbangan penyelenggaraan jangka panjang — contohnya, dalam perkakas pengguna dengan jangka hayat produk yang ditentukan, robot penggemar, automasi volum rendah atau sebarang aplikasi yang penggantian berus adalah tugas penyelenggaraan berjadual yang boleh diterima. Pilih tanpa berus apabila motor akan berjalan secara berterusan selama bertahun-tahun, apabila kecekapan secara langsung memberi kesan kepada kos operasi atau hayat bateri, apabila EMI mesti diminimumkan, atau apabila aplikasi tidak boleh bertolak ansur dengan masa henti penyelenggaraan — seperti dalam peranti perubatan, automasi industri atau peralatan tertutup.

Salah satu kelebihan paling praktikal bagi motor DC berus ialah rangkaian teknik kawalan kelajuan yang mantap dan murah yang tersedia untuk pereka bentuk.
PWM ialah kaedah dominan untuk mengawal motor DC berus dalam aplikasi moden. IC pemacu motor — dikonfigurasikan sebagai jambatan H — menghidupkan dan mematikan voltan bekalan kepada motor pada frekuensi tetap, biasanya 10–20 kHz. Purata voltan yang dihantar ke motor, dan oleh itu kelajuannya, ditentukan oleh kitaran tugas: kitaran tugas 75% pada 12V menyampaikan kira-kira 9V bersamaan. Konfigurasi jambatan H menggunakan empat transistor pensuisan yang disusun supaya motor boleh digerakkan dalam kedua-dua arah dengan menterbalikkan pasangan aktif, membolehkan operasi dua arah dengan cip pemacu tunggal. IC jambatan H biasa termasuk L298N (sehingga 2A setiap saluran), TB6612FNG (1.2A berterusan, digemari untuk projek mikropengawal kerana keserasian tahap logiknya), dan DRV8833 (1.5A, jejak padat, pengehad arus terbina dalam). Untuk motor berus kuasa lebih tinggi, jambatan MOSFET H diskret atau modul pemacu motor khusus yang dinilai pada 10A, 20A atau lebih boleh didapati.
Kawalan PWM gelung terbuka menetapkan kelajuan motor dengan menetapkan kitaran tugas, tetapi kelajuan aci sebenar berbeza dengan beban — apabila beban meningkat, kelajuan menurun. Untuk aplikasi yang memerlukan kelajuan yang tepat dan konsisten tanpa mengira variasi beban, penderia maklum balas menutup gelung kawalan. Pengekod kuadratur yang dipasang pada aci motor atau output menyediakan data kedudukan dan kelajuan kepada pengawal PID yang dijalankan pada mikropengawal atau pengawal gerakan khusus. Algoritma PID membandingkan kelajuan yang diukur dengan titik tetapan dan melaraskan kitaran tugas dalam masa nyata untuk mengimbangi. Pendekatan ini adalah standard dalam mesin CNC, sambungan robotik, dan mana-mana sistem di mana ketepatan kedudukan dan halaju penting. Pengekod magnet lebih disukai dalam persekitaran yang berdebu atau terdedah kepada getaran; pengekod optik menawarkan resolusi yang lebih tinggi dalam persekitaran yang bersih.
Untuk motor DC berus shunt dan luka kompaun, kelajuan juga boleh dilaraskan dengan mengubah arus medan secara bebas daripada voltan angker. Mengurangkan arus medan melemahkan medan magnet, yang mengurangkan EMF belakang dan membolehkan motor berputar lebih pantas untuk voltan angker tertentu — teknik yang dipanggil melemahkan medan. Ini memanjangkan julat kelajuan boleh guna motor melebihi kelajuan asas yang ditetapkan oleh voltan angker terkadar, dengan kos tork tersedia yang dikurangkan. Pelemahan medan biasanya digunakan dalam pemacu kelajuan berubah industri untuk peralatan mesin, mesin penggulungan dan kilang bergolek di mana julat kelajuan yang luas diperlukan.
Motor DC berus boleh dibrek secara aktif tanpa brek geseran mekanikal. Brek dinamik litar pintas motor melalui perintang apabila isyarat pemacu dikeluarkan — motor bertindak sebagai penjana, menukar tenaga kinetik kepada memanaskan perintang dan menyahpecutan dengan cepat. Brek penjanaan semula pergi lebih jauh: bukannya melesapkan tenaga sebagai haba, pemacu penjanaan semula mengembalikan tenaga brek kembali kepada bekalan kuasa atau bateri. Ini ialah kaedah brek standard dalam kenderaan elektrik, forklift, dan pemacu industri penjanaan semula, di mana pemulihan tenaga meluaskan julat atau mengurangkan kos operasi secara bermakna.
Walaupun persaingan daripada teknologi motor tanpa berus dan motor stepper, motor DC berus tetap menjadi pilihan dominan dalam pelbagai aplikasi di mana kos, kesederhanaan dan kebolehkawalannya memberikan kelebihan yang menentukan.
Berus karbon dan komutator ialah komponen haus utama dalam motor DC berus, dan mengurusnya dengan betul adalah kunci untuk memaksimumkan hayat perkhidmatan dan mengelakkan kegagalan yang tidak dirancang.
Berus karbon haus melalui gabungan lelasan mekanikal terhadap permukaan komutator berputar dan hakisan elektrokimia daripada lengkok yang berlaku setiap kali peralihan berus antara segmen komutator. Filem nipis kuprum oksida dan grafit - dipanggil patina atau filem - terkumpul di permukaan komutator semasa operasi biasa dan sebenarnya mengurangkan geseran dan kadar haus. Mengganggu filem ini dengan menggunakan berus yang salah, beroperasi dalam keadaan terlalu kering atau lembap, atau menjalankan motor dengan percikan api yang ketara mempercepatkan haus. Jangka hayat berus biasa untuk motor DC berus dalam tugas berterusan adalah antara 500 jam untuk motor pengguna yang dibina ringan hingga 3,000 jam atau lebih untuk motor gred industri dengan berus grafit berkualiti tinggi dan penyelenggaraan permukaan komutator yang betul.
Permukaan komutator hendaklah licin, silinder dan berwarna coklat sederhana daripada filem patina yang sihat. Alur yang dipotong oleh berus haus, bintik rata akibat haus yang tidak rata, atau kesan terbakar hitam akibat percikan api yang berlebihan semuanya memerlukan tindakan pembetulan. Pengoksidaan permukaan ringan boleh digilap dengan kayu pembersih komutator (kayu grafit atau batu komutator) yang digunakan pada komutator berputar tanpa membuka motor. Alur yang lebih dalam dan keadaan luar pusingan memerlukan pemesinan — memutarkan komutator pada mesin pelarik untuk memulihkan kepekatan — selepas itu penebat mika antara segmen komutator mesti dipotong untuk mengelakkannya daripada menunggang di atas permukaan tembaga. Prosedur ini memanjangkan hayat motor dengan ketara dan merupakan amalan standard dalam program penyelenggaraan motor industri.
Kesilapan pemilihan motor adalah perkara biasa dan mahal. Rangka kerja praktikal ini memastikan anda mengambil kira parameter yang sebenarnya menentukan sama ada motor akan berfungsi dengan pasti dalam aplikasi anda.
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *
Hak cipta © Zhejiang Dongzheng Motor Co., Ltd. Semua hak terpelihara.
 Pengilang Motor Gear DC
Pengilang Motor Gear DC