











Perundingan produk
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *


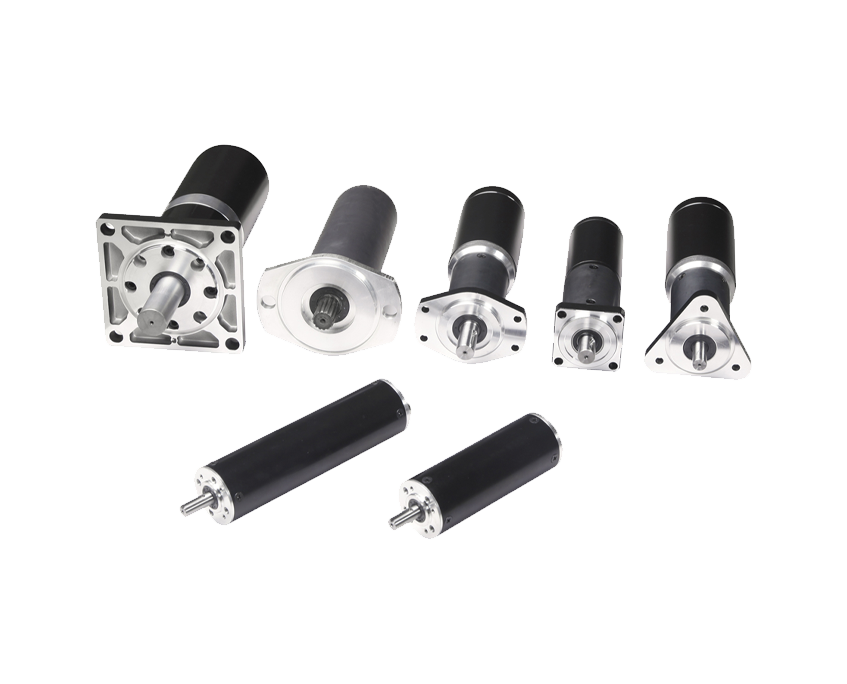
Motor gear DC ialah motor elektrik arus terus yang dipasangkan dengan kotak gear mekanikal dalam satu unit bersepadu. Motor itu sendiri berputar pantas — selalunya 3,000 hingga 15,000 RPM pada voltan terkadar — tetapi kebanyakan aplikasi dunia sebenar memerlukan pergerakan perlahan dan terkawal dengan daya pusingan yang besar. Kotak gear menyelesaikannya dengan menukar kelajuan untuk tork melalui satu siri gear meshing. Hasilnya ialah aci keluaran yang berputar jauh lebih perlahan daripada pemutar motor, tetapi dengan tork yang lebih tinggi secara berkadar tersedia pada aci.
Tanpa kotak gear, motor DC kecil boleh memutar bilah kipas dengan mudah tetapi sukar untuk mengangkat beban, memacu tali pinggang penghantar atau memutar injap. Dengan pengurangan gear, katakan, 100:1, motor yang sama yang menghasilkan 5 mN·m tork larian bebas kini memberikan kira-kira 500 mN·m pada output — tolak kerugian daripada geseran mesh gear, biasanya 5–20% bergantung pada jenis gear dan pelinciran. Penggandaan tork itu, digabungkan dengan penyepaduan padat motor dan kotak gear ke dalam satu pemasangan, itulah sebabnya motor bergear DC adalah antara komponen gerakan yang paling banyak dinyatakan dalam aplikasi industri, komersial dan pengguna.
Reka bentuk kotak gear mempunyai impak yang lebih besar pada prestasi, saiz, kecekapan dan bunyi daripada hampir mana-mana pembolehubah reka bentuk lain. Empat konfigurasi menguasai pasaran.
Gear taji mempunyai gigi lurus yang dipotong selari dengan paksi aci. Ia adalah jenis gear yang paling mudah dan paling murah untuk dihasilkan, yang menjadikan motor DC gear taji sebagai pilihan lalai untuk aplikasi sensitif kos. Kelemahan utama mereka ialah bunyi bising: kerana lebar gigi penuh terlibat serentak pada setiap sentuhan mesh, gear pacu menghasilkan bunyi berdenting pada kelajuan tinggi. Kecekapan adalah baik — biasanya 95–98% setiap peringkat — dan ia mengendalikan beban jejarian sederhana dengan baik. Motor gear taji adalah perkara biasa dalam pencetak, mainan, mesin layan diri dan penggerak ringan di mana operasi senyap tidak menjadi keutamaan.
Kotak gear planet menyusun berbilang gear "planet" mengelilingi gear "matahari" pusat, semuanya terkandung dalam gear gelang. Oleh kerana beban dikongsi merentasi beberapa gear planet secara serentak, motor gear DC planet memberikan ketumpatan tork yang sangat tinggi dalam pakej koaksial yang padat. Aci keluaran diselaraskan dengan aci motor, yang memudahkan pemasangan dalam susun atur yang terhad ruang. Kotak gear planet adalah lebih kaku dan lebih tepat daripada jenis spur atau cacing, menjadikannya pilihan pilihan untuk robotik, kenderaan berpandu automatik (AGV), pemutar skru elektrik, dan sebarang aplikasi yang memerlukan tork yang tinggi, ketepatan kedudukan yang ketat dan hayat perkhidmatan yang panjang. Pertukarannya ialah kos: kotak gear planet jauh lebih mahal untuk dihasilkan daripada jenis spur atau heliks pada penarafan tork yang sama.
Kotak gear cacing menggunakan aci cacing seperti skru yang bercantum dengan roda cacing pada sudut 90 darjah. Konfigurasi ini mencapai nisbah pengurangan yang sangat tinggi dalam satu peringkat — lazimnya 5:1 hingga 100:1 — dan menyediakan ciri mengunci diri semula jadi: apabila motor berhenti, beban tidak boleh memacu kotak gear ke belakang. Ini menjadikan motor DC gear cacing sesuai untuk aplikasi di mana beban mesti memegang kedudukan tanpa kuasa, seperti pembuka pintu garaj, lif pentas, penggerak katil hospital dan halangan keselamatan. Had utama ialah kecekapan: geseran mesh gear cacing adalah tinggi, dengan kecekapan satu peringkat biasa antara 50–90% bergantung pada sudut plumbum, dengan nisbah yang lebih tinggi menjadi kurang cekap secara progresif. Motor gear cacing juga menghasilkan haba yang ketara di bawah kitaran tugas beban tinggi yang berterusan.
Gear heliks mempunyai gigi dipotong pada sudut ke paksi aci, jadi sentuhan antara gigi adalah beransur-ansur dan progresif dan bukannya mendadak. Ini secara mendadak mengurangkan bunyi dan getaran berbanding dengan gear taji dan sedikit meningkatkan kapasiti beban disebabkan oleh kawasan sentuhan berkesan yang lebih besar. Motor gear DC heliks adalah perkara biasa dalam aplikasi yang memerlukan operasi yang lebih senyap — pemacu penghantar, jentera pembungkusan dan peralatan perubatan. Gabungan serong heliks membolehkan aci keluaran diimbangi pada 90 darjah kepada motor, serupa dengan pemacu cacing tetapi dengan kecekapan yang lebih tinggi (biasanya 94–97% setiap peringkat). Daya tujah paksi meningkat yang dihasilkan oleh jejaring gear heliks memerlukan galas yang boleh mengendalikan beban ini, yang menambah sedikit kepada kos unit.
Elemen motor DC itu sendiri terdapat dalam dua seni bina asas, dan pilihan di antara mereka mempengaruhi kos, keperluan penyelenggaraan, julat kelajuan dan hayat perkhidmatan dengan ketara.
| Ciri | Motor Gear DC Berus | Motor Gear DC tanpa berus (BLDC) |
| Kaedah Pergantian | Mekanikal (pengubah berus karbon) | Elektronik (ESC atau pemandu motor) |
| Hayat Perkhidmatan Biasa | 500–3,000 jam (pemakaian berus terhad) | 10,000–20,000 jam |
| Kerumitan Kawalan | Mudah — voltan atau PWM terus | Memerlukan pemandu BLDC khusus/ESC |
| Kecekapan | 75–85% tipikal | 85–95% tipikal |
| Bunyi bising & EMI | Lebih tinggi (arka berus menjana EMI) | Lebih rendah |
| Kos Unit | Lebih rendah | Lebih tinggi (pemandu motor) |
| Aplikasi Biasa | Mainan, peralatan, automasi ringan | Robotik, AGV, peranti perubatan, EV |
Untuk prototaip atau aplikasi terputus-putus tugas rendah, motor gear DC berus yang digerakkan oleh jambatan H L298N atau TB6612FNG ringkas ialah laluan terpantas dan termurah ke sistem kerja. Untuk apa-apa yang berjalan secara berterusan, beroperasi dalam persekitaran yang keras, atau mesti bertahan bertahun-tahun dalam lapangan tanpa penyelenggaraan, motor gear DC tanpa berus — walaupun kos pendahuluannya lebih tinggi dan elektronik pemandu tambahan — hampir selalu memberikan jumlah kos pemilikan yang lebih baik.
Lembaran data motor gear DC boleh menjadi padat, tetapi lima parameter menentukan sama ada motor akan berfungsi dalam aplikasi anda. Memahami setiap satu menghalang kesilapan pemilihan yang paling biasa.
Motor gear DC direka bentuk untuk voltan bekalan tertentu — selalunya 6V, 12V, 24V atau 48V dalam aplikasi industri dan hobi. Mengendalikan motor dengan ketara melebihi voltan terkadarnya mempercepatkan haus berus dalam jenis berus, terlalu panas belitan dan memendekkan hayat galas. Beroperasi di bawah voltan terkadar mengurangkan tork yang tersedia dan boleh menyebabkan motor terhenti di bawah beban. Untuk sistem berkuasa bateri, padankan voltan terkadar motor dengan voltan pek bateri nominal pada pertengahan cas, bukan pada cas penuh, untuk mengelakkan voltan lampau di bahagian atas kitaran cas. Motor gear DC 12V yang dijalankan daripada LiPo 3S yang baru dicas (12.6V) boleh diterima sedikit; menjalankannya daripada pek 4S (16.8V) akan memusnahkannya dengan cepat.
Kelajuan tanpa beban ialah RPM aci keluaran apabila motor berjalan pada voltan terkadar dengan tork terpakai sifar. Di bawah beban sebenar, kelajuan menurun — lazimnya sebanyak 10–20% pada tork yang diberi nilai (berterusan), dan sehingga 50% pada tork gerai puncak. Apabila mengira sama ada motor bergear DC boleh menggerakkan beban pada kelajuan yang diperlukan, sentiasa gunakan kelajuan dimuatkan pada titik operasi tork yang anda jangkakan, bukan angka tanpa beban. Pengilang kadangkala hanya menyenaraikan kelajuan tanpa beban dan tork gerai; titik operasi yang dimuatkan jatuh kira-kira di tengah-tengah lengkung tork kelajuan.
Tork terkadar (juga dipanggil tork berterusan) ialah tork maksimum yang boleh dihasilkan oleh motor selama-lamanya tanpa terlalu panas. Tork gerai ialah tork puncak yang dihasilkan apabila aci dipegang pegun - biasanya 5–10 kali tork terkadar untuk motor gear DC yang disikat. Tork gerai berguna untuk menentukan saiz beban puncak terputus-putus (contohnya daya yang diperlukan untuk memecahkan injap tersekat, contohnya), tetapi beroperasi secara berterusan di atau berhampiran gerai akan memanaskan motor dengan cepat. Pilih motor yang tork dinilainya sekurang-kurangnya 20–30% melebihi jangkaan tork beban berterusan aplikasi anda. Margin keselamatan ini menyumbang kepada variasi geseran, kendur voltan dan penurunan suhu.
Nisbah gear menyatakan berapa banyak putaran aci motor menghasilkan satu putaran aci keluaran. Nisbah 50:1 bermakna output bertukar sekali untuk setiap 50 pusingan motor. Nisbah gear yang lebih tinggi menghasilkan kelajuan keluaran yang lebih rendah dan tork keluaran yang lebih tinggi. Walau bagaimanapun, nisbah yang sangat tinggi memperkenalkan lebih banyak peringkat gear, yang meningkatkan kehilangan geseran dan tindak balas — jumlah kecil permainan percuma dalam aci keluaran apabila arah berbalik. Untuk aplikasi penentududukan, tindak balas adalah spesifikasi kritikal: kotak gear planet biasanya menawarkan 0.5–3 minit arka tindak balas dalam gred ketepatan, manakala kotak gear pemacu ekonomi mungkin mempunyai 1–5 darjah tindak balas, yang tidak boleh diterima untuk apa-apa yang memerlukan kedudukan berulang.
Kitaran tugas menerangkan peratusan masa motor beroperasi berbanding rehat dalam tempoh kitaran tertentu. Motor berkadar untuk S1 (tugas berterusan) boleh berjalan selama-lamanya pada beban berkadar tanpa terlalu panas. Penarafan S2 (tugas masa pendek) dan S3 (tugas berkala terputus-putus) membenarkan tahap kuasa puncak yang lebih tinggi kerana motor menjadi sejuk semasa tempoh mati. Sentiasa padankan penarafan tugas motor dengan kitaran pengendalian sebenar anda — motor yang dinilai untuk kitaran tugas 30% akan menjadi terlalu panas dan gagal jika dijalankan secara berterusan, walaupun tork dan kelajuan berada dalam had plat nama.

Pemilihan voltan selalunya didorong oleh sumber kuasa yang tersedia dan bukannya oleh keutamaan motor, tetapi memahami kes penggunaan biasa untuk setiap peringkat voltan membantu mengecilkan pilihan anda dengan cepat.
Memperbetulkan pemilihan motor pada kali pertama mengelakkan reka bentuk semula yang mahal dan kegagalan medan. Ikuti rangka kerja praktikal ini:
Kira tork yang diperlukan oleh aplikasi anda pada aci keluaran. Untuk robot beroda, ini bermakna mengira daya yang diperlukan untuk mempercepatkan jisim robot, mengatasi geseran bergolek dan memanjat sebarang kecondongan yang dijangkakan dalam operasi. Untuk penggerak linear, kira daya pada skru plumbum dan tukarkannya kepada tork motor melalui plumbum dan kecekapan skru. Tambahkan margin keselamatan 25–50% untuk mengambil kira variasi geseran, penuaan dan senario pemuatan terburuk. Nombor tork sasaran ini — dengan margin digunakan — menjadi spesifikasi tork terkadar minimum anda.
Tetapkan kelajuan aci keluaran minimum dan maksimum yang diperlukan oleh aplikasi anda. Penghantar yang menggerakkan produk pada 0.5 m/s dengan penggelek pemacu diameter 50 mm memerlukan kelajuan output kira-kira 191 RPM (0.5 / (π × 0.05) × 60). Pilih motor yang kelajuan tanpa bebannya sekurang-kurangnya 15–20% melebihi kelajuan dimuatkan yang diperlukan untuk memastikan motor tidak beroperasi berhampiran gerai dalam keadaan biasa.
Gunakan panduan keputusan berikut untuk memadankan jenis kotak gear dengan keperluan aplikasi:
Semak sama ada bekalan kuasa anda boleh menyampaikan permintaan arus puncak motor di gerai. Arus gerai untuk motor gear DC berus biasanya 5–10 kali ganda arus tanpa beban. Jika bekalan anda tidak dapat menyumber arus ini secara sementara semasa keadaan permulaan atau kesesakan, tambahkan pemacu motor pengehad arus dengan had arus boleh laras atau pilih pemandu motor dengan ruang kepala yang mencukupi. Untuk motor gear DC tanpa berus, sahkan penarafan arus berterusan dan puncak pemacu BLDC melebihi keperluan motor dengan margin sekurang-kurangnya 20%.
Motor gear DC standard tidak dimeterai. Jika motor akan terdedah kepada habuk, lembapan, percikan penyejuk, atau keadaan pencucian, nyatakan unit berkadar IP — IP54 untuk perlindungan habuk dan percikan, IP65 atau IP67 untuk persekitaran yang lebih mencabar. Untuk aplikasi pemprosesan makanan, farmaseutikal atau marin, sahkan bahawa pelincir kotak gear memenuhi keperluan kawal selia yang berkenaan (contohnya gris gred makanan NSF H1 untuk zon sentuhan makanan). Julat suhu operasi juga penting: motor standard dinilai untuk ambien 0–40°C; untuk gudang stor sejuk atau pemasangan luar di iklim Utara, sahkan spesifikasi gris suhu rendah dan penarafan suhu penggulungan.
Motor bergear DC muncul dalam rangkaian produk dan sistem yang sangat besar. Memahami tempat ia biasa digunakan membantu mengenal pasti reka bentuk rujukan yang sesuai dan konfigurasi yang disahkan.
| industri | Permohonan | Jenis Motor Gear Biasa |
| Robotik & AGV | Roda pemacu, penggerak sendi, mekanisme pencengkam | Planet tanpa berus, 24V–48V |
| Automasi Perindustrian | Penghantar, jadual pengindeksan, penggerak injap | Heliks, cacing atau planet, 24V |
| Peranti Perubatan | Pam infusi, alat pembedahan, katil hospital | Planet tanpa berus, tindak balas rendah, 12V–24V |
| Automotif | Tingkap kuasa, pelaras tempat duduk, pemacu bumbung matahari | Cacing berus atau taji, 12V |
| Elektronik Pengguna | Kuali/condongkan kamera, penggerak rumah pintar, pencetak | Taji berus, 5V–12V |
| pertanian | Kawalan injap pengairan, mekanisme pembenihan | Cacing atau planet berkadar IP, 12V–24V |
| Automasi Bangunan | Peredam HVAC, penggerak buta, pemacu pintu | Heliks atau cacing tanpa berus, 24V |
Motor gear DC sangat sesuai untuk operasi kelajuan berubah-ubah kerana kelajuan motor DC adalah berkadar terus dengan voltan yang digunakan. Dalam amalan, kelajuan dikawal oleh salah satu daripada tiga kaedah.
PWM ialah kaedah standard untuk mengawal motor gear DC berus daripada mikropengawal, PLC dan IC pemacu motor. Pemandu menghidupkan dan mematikan bekalan motor pada frekuensi tetap — biasanya 1–20 kHz — dan kitaran tugas (peratusan masa bekalan dihidupkan) menentukan voltan purata dan oleh itu kelajuan. Kitaran tugas 50% pada 12V menyampaikan kira-kira 6V bersamaan dengan motor. Kawalan PWM adalah cekap kerana transistor pensuisan menghabiskan sebahagian besar masanya dihidupkan atau dimatikan sepenuhnya, meminimumkan kehilangan rintangan. Frekuensi PWM di bawah 1 kHz boleh menyebabkan bunyi motor yang boleh didengar apabila belitan angker bergetar pada frekuensi pensuisan; frekuensi melebihi 20 kHz menolak ini di atas julat boleh didengar. Untuk motor gear DC berus, frekuensi PWM 10–20 kHz ialah pilihan praktikal yang biasa.
Untuk aplikasi yang memerlukan kelajuan yang tepat dan konsisten tanpa mengira variasi beban — platform robotik, pemacu pita, pendispensan ketepatan — pengekod berputar yang dipasang pada aci motor atau output kotak gear memberikan maklum balas kelajuan masa nyata kepada pengawal PID. Pengawal membandingkan kelajuan sebenar dengan titik tetapan dan melaraskan kitaran tugas PWM untuk mengimbangi. Pengekod untuk motor gear DC biasanya jenis kuadratur optik atau kesan dewan magnetik, dengan resolusi dari 6 hingga beberapa ribu kiraan setiap revolusi bergantung pada keperluan ketepatan. Banyak pembekal motor gear DC menawarkan pilihan pengekod bersepadu sebagai item katalog standard, memudahkan penyepaduan perkakasan dengan ketara.
Dalam sistem ringkas di mana beban secara relatifnya tetap dan ketepatan kelajuan tidak kritikal, kelajuan boleh ditetapkan dengan melaraskan voltan bekalan dengan bekalan kuasa DC berubah-ubah atau pengatur voltan linear. Pendekatan ini adalah yang paling tidak cekap — pengawal selia linear menghilangkan penurunan voltan sebagai haba — dan tidak menawarkan pampasan beban, tetapi ia adalah pelaksanaan yang paling mudah dan sesuai untuk bangku ujian, pelarasan kelajuan manual dan aplikasi kuasa yang sangat rendah di mana pelesapan haba dalam pengawal selia tidak menjadi kebimbangan.
Memahami perkara yang akhirnya menyebabkan motor gear DC gagal membantu anda mereka bentuk sistem yang memanjangkan selang perkhidmatan dan menangkap masalah sebelum ia menyebabkan masa henti yang tidak dirancang.
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *
Hak cipta © Zhejiang Dongzheng Motor Co., Ltd. Semua hak terpelihara.
 Pengilang Motor Gear DC
Pengilang Motor Gear DC