











Perundingan produk
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *


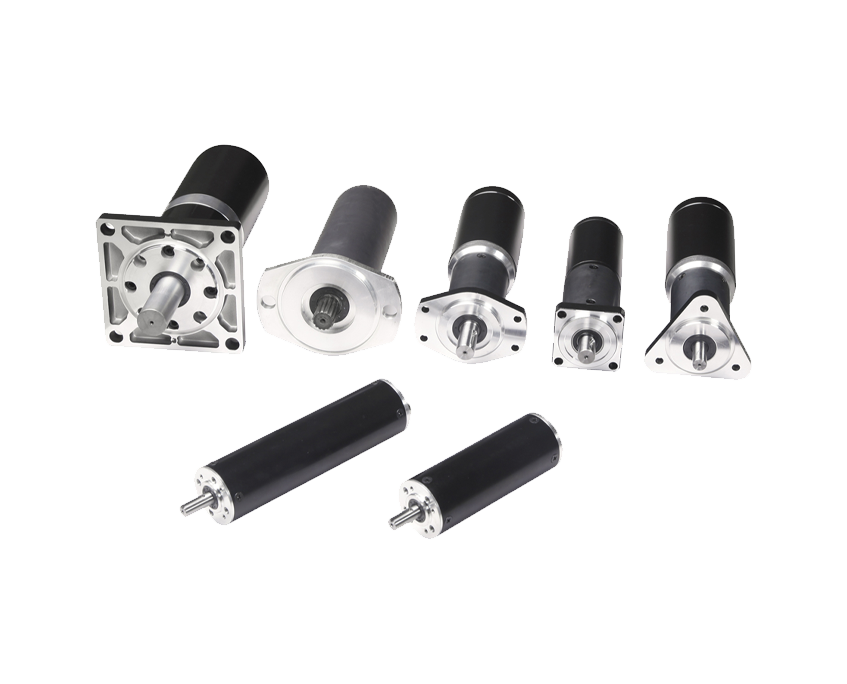
Motor gear DC ialah pemasangan elektromekanikal serba lengkap yang menggabungkan motor elektrik arus terus dengan kotak gear mekanikal bersepadu, menghasilkan satu unit yang mampu memberikan tork yang lebih tinggi pada kelajuan aci keluaran yang lebih rendah daripada yang boleh disediakan oleh motor sahaja. Tujuan asas untuk mengintegrasikan kotak gear dengan motor DC adalah untuk menukar kelajuan putaran untuk tork melalui pengurangan gear — motor arus terus berputar pada 3,000–15,000 RPM dalam keadaan semula jadinya adalah pantas dan agak lemah dari segi daya putaran, tetapi selepas melepasi putaran itu melalui kotak gear dengan nisbah pengurangan 50:1 atau 100:00 putaran pada aci keluaran 6PM–1, manakala putaran RPM 60:1. tork didarab dengan nisbah yang sama (tolak kerugian kecekapan). Penukaran kelajuan-ke-tork ini adalah ciri yang menentukan yang menjadikan motor gear DC amat diperlukan dalam pelbagai aplikasi mekanikal yang besar.
Elemen motor DC dalam motor gear menukar tenaga elektrik daripada sumber kuasa arus terus — yang mungkin bateri, bekalan kuasa DC terkawal, sistem panel solar atau bekalan AC yang diperbetulkan — kepada tenaga mekanikal putaran melalui interaksi elektromagnet antara medan pemegun motor dan belitan pemutar atau magnet kekal. Motor DC amat sesuai untuk aplikasi yang memerlukan kelajuan berubah-ubah dan kawalan arah mudah, kerana kedua-dua kelajuan (melalui voltan atau pelarasan isyarat PWM) dan arah (melalui pembalikan kekutuban bekalan) boleh diuruskan dengan elektronik mudah, menjadikan motor gear DC pilihan semula jadi untuk berkuasa bateri, sistem terbenam dan aplikasi mekatronik kelajuan berubah-ubah.
Komponen kotak gear yang dipasang pada motor DC berfungsi dengan pelbagai fungsi melangkaui pengurangan kelajuan yang mudah. Ia juga menyediakan kelebihan mekanikal yang membolehkan motor yang lebih kecil, ringan dan lebih murah untuk melakukan kerja yang sebaliknya memerlukan motor pemacu terus yang lebih besar — mengurangkan kos sistem, berat dan saiz secara serentak. Dalam banyak aplikasi, kotak gear juga menyediakan tahap rintangan pacuan belakang (terutamanya dalam konfigurasi gear cacing), bermakna beban tidak boleh memacu motor ke belakang dengan mudah melalui kotak gear apabila kuasa dibuang, yang berharga dalam aplikasi penentududukan, pengangkatan dan pegangan di mana pegangan beban tanpa cabutan kuasa berterusan diperlukan.
Memahami cara subsistem motor dan kotak gear berinteraksi dalam motor gear DC adalah penting untuk mentafsir spesifikasi prestasi dengan betul dan meramalkan gelagat sistem dalam aplikasi sebenar. Kedua-dua subsistem digandingkan secara mekanikal melalui aci yang dikongsi tetapi mempunyai ciri-ciri operasi yang berbeza yang mesti dipertimbangkan bersama.
Motor DC menjana tork dan kelajuan mengikut pemalar motornya (Kv — pemalar EMF belakang, dinyatakan dalam RPM per volt) dan tork gerainya (torsi maksimum yang boleh dihasilkan oleh motor pada kelajuan sifar, dihadkan oleh rintangan elektrik dan voltan bekalannya). Di antara kedua-dua ekstrem ini, motor DC beroperasi sepanjang lengkung kelajuan tork yang lebih kurang linear — apabila tork beban meningkat, kelajuan berkurangan secara berkadar, dan arus yang dikeluarkan daripada bekalan meningkat. Hubungan ini bermakna bahawa motor gear DC yang berjalan tanpa beban berputar hampir dengan kelajuan tanpa beban teorinya, manakala motor gear yang memandu beban berat di gerai menarik arus maksimum dan menghasilkan tork maksimum pada kelajuan sifar. Memahami hubungan kelajuan tork ini adalah penting untuk mensaiz motor gear DC dengan betul — memilih motor yang titik kendaliannya terkadar berada dalam julat pertengahan lengkung kelajuan torknya memastikan operasi yang cekap dan margin terma yang mencukupi.
Kotak gear menukar keluaran motor berkelajuan tinggi, tork rendah kepada keluaran tork berkelajuan rendah dan tinggi yang diperlukan oleh aplikasi. Nisbah pengurangan gear (N) menentukan pendaraban: tork keluaran bersamaan tork motor didarab dengan N dan dengan kecekapan mekanikal kotak gear (η), manakala kelajuan output sama dengan kelajuan motor dibahagikan dengan N. Motor gear DC dengan kotak gear planet 100:1 yang mempunyai kecekapan 90% oleh itu akan memberikan 90 kali tork motor pada kelajuan motor 1/100 pada output motor. Faktor kecekapan ini — lazimnya 70–95% bergantung pada jenis kotak gear, bilangan peringkat dan keadaan operasi — bermakna tork keluaran dunia sebenar sentiasa lebih rendah daripada pendaraban nisbah gear teori yang dicadangkan, dan kehilangan kecekapan ini muncul sebagai haba yang dijana dalam kotak gear.
Motor gear DC dibina berdasarkan beberapa teknologi motor DC yang berbeza, setiap satu dengan ciri prestasi berbeza, keperluan kawalan, jangkaan hayat perkhidmatan dan profil kos. Memilih jenis motor yang betul dalam pemasangan motor gear adalah sama pentingnya dengan memilih konfigurasi kotak gear.
Motor DC berus adalah jenis motor yang paling biasa ditemui dalam motor gear DC, terutamanya dalam julat kuasa kecil dan sederhana yang sensitif kos. Mereka menggunakan sistem pertukaran mekanikal — berus karbon yang menekan pada gelang komutator kuprum yang berputar — untuk menukar arah arus dalam belitan pemutar dan mengekalkan putaran berterusan. Motor gear DC berus adalah mudah untuk dikawal (kelajuan adalah berkadar dengan voltan; arah ditentukan oleh kekutuban), murah untuk dikeluarkan, dan mampu tork permulaan yang tinggi. Had motor berus ialah haus berus karbon dan sistem komutator — sentuhan mekanikal ini mewujudkan hayat perkhidmatan yang ditentukan biasanya dalam julat 500–3,000 jam bergantung pada keadaan operasi, tahap semasa dan reka bentuk motor. Haus berus menghasilkan habuk karbon yang boleh menyebabkan masalah dalam persekitaran bersih atau gred makanan, dan arka berus menghasilkan gangguan elektromagnet yang mesti diuruskan dalam sistem elektronik yang sensitif.
Motor gear DC tanpa berus menggantikan pertukaran mekanikal motor berus dengan pertukaran elektronik menggunakan penderia kesan Hall atau pengesan EMF belakang untuk menentukan kedudukan pemutar dan menukar arus kepada belitan stator yang betul. Menghapuskan sentuhan komutator berus menghilangkan mekanisme haus utama motor berus, memanjangkan hayat perkhidmatan kepada 10,000–30,000 jam atau lebih — kelebihan transformatif untuk aplikasi yang memerlukan kebolehpercayaan tinggi dalam tempoh perkhidmatan yang panjang. Motor gear BLDC juga berjalan dengan lebih senyap, menghasilkan kurang haba, dan boleh mencapai kecekapan yang lebih tinggi daripada motor berus yang setara. Pertukarannya ialah kerumitan kos dan kawalan — Motor BLDC memerlukan pengawal motor elektronik (pemacu ESC atau BLDC) dan bukannya aplikasi voltan ringkas, menambah kedua-dua kos komponen dan kerumitan sistem. Untuk aplikasi yang memerlukan hayat perkhidmatan yang panjang, operasi kitaran tugas yang tinggi atau operasi dalam persekitaran yang bersih, premium untuk motor gear BLDC biasanya wajar.
Kebanyakan kecil dan sederhana Motor gear DC gunakan binaan motor magnet kekal (PM), di mana medan pemegun disediakan oleh magnet kekal dan bukannya gegelung medan luka. Motor DC PM adalah padat, cekap pada beban separa, dan mempunyai hubungan kelajuan tork linear yang memudahkan pemodelan sistem. Kualiti dan gred magnet kekal yang digunakan mempengaruhi prestasi motor dengan ketara — magnet ferit adalah kos yang lebih rendah tetapi menghasilkan ketumpatan fluks yang lebih rendah, manakala magnet nadir bumi (neodymium-iron-boron, atau NdFeB) menghasilkan fluks yang jauh lebih tinggi dalam volum yang lebih kecil, membolehkan reka bentuk motor gear yang lebih padat dan berketumpatan kuasa lebih tinggi. Motor gear DC premium untuk aplikasi yang menuntut biasanya menggunakan magnet NdFeB, manakala motor gear bajet menggunakan magnet ferit.
Kotak gear disepadukan dengan motor DC menentukan banyak ciri fizikal motor gear — termasuk kapasiti tork keluaran, pukulan belakang, rintangan pacuan belakang, tahap hingar, kecekapan dan faktor bentuk fizikal. Jenis kotak gear yang berbeza sesuai dengan keperluan aplikasi yang berbeza, dan memahami pertukaran mereka adalah penting untuk pemilihan motor gear yang termaklum.
Kotak gear planet ialah pilihan premium untuk motor gear DC yang memerlukan kapasiti tork tinggi dalam faktor bentuk padat, tindak balas yang rendah dan kecekapan mekanikal yang tinggi. Susunan planet — terdiri daripada gear matahari tengah, gear planet berbilang yang mengorbit gear matahari sambil dirangkai dengan gear gelang luar, dan pembawa planet yang berfungsi sebagai output — mengagihkan beban merentasi berbilang jerat gear secara serentak. Perkongsian beban ini membolehkan kotak gear planet menghantar tork yang jauh lebih tinggi daripada kotak gear taji bersaiz setara sambil mengekalkan penjajaran sepusat aci input dan output yang sangat baik. Motor gear DC planet digunakan secara meluas dalam robotik, penentududukan ketepatan, peralatan automasi, dan sebarang aplikasi yang ketumpatan tork tinggi dan tindak balas yang rendah adalah keperluan kritikal. Kotak gear planet berbilang peringkat mencapai nisbah pengurangan daripada 3:1 hingga 1000:1 atau seterusnya dengan menyusun berbilang peringkat planet secara bersiri, dengan setiap peringkat menyumbang kepada jumlah pengurangan dan kecekapan keseluruhan adalah hasil daripada kecekapan individu setiap peringkat.
Kotak gear spur menggunakan satu siri gear spur paksi selari dalam susunan yang dilangkah ke bawah untuk mencapai pengurangan kelajuan. Ia adalah jenis kotak gear yang paling ringkas dan paling menjimatkan kos, mudah dihasilkan dengan toleransi yang konsisten, dan mampu kecekapan tinggi (85–95% setiap peringkat) dalam keadaan bersih dan dilincirkan dengan baik. Motor gear Spur DC ialah pilihan standard untuk aplikasi sensitif kos di mana ketumpatan tork yang lebih tinggi dan susunan aci sepusat reka bentuk planet tidak diperlukan. Ia digunakan secara meluas dalam produk pengguna, mainan, peralatan rumah, dan peralatan industri ringan am. Had kotak gear spur ialah ia membawa beban pada satu sentuhan gigi pada setiap titik jaringan (tidak seperti reka bentuk planet), yang mengehadkan kapasiti tork mereka untuk saiz gear tertentu, dan ia menghasilkan lebih banyak bunyi daripada reka bentuk planet disebabkan oleh corak sentuhan gigi yang tidak bergelombang.
Kotak gear cacing menggunakan cacing (benang heliks yang menyerupai skru) yang dirangkai dengan roda cacing (gear dengan gigi bersudut untuk disambungkan dengan heliks cacing) untuk mencapai nisbah pengurangan yang tinggi dalam satu peringkat — biasanya 5:1 hingga 100:1 atau lebih dalam satu jaringan. Geometri unik gear cacing menghasilkan sentuhan gelongsor dan bukannya bergolek antara cacing dan roda, yang menjana lebih banyak haba dan kecekapan yang lebih rendah daripada reka bentuk taji atau planet (biasanya 50–90% bergantung pada nisbah pengurangan dan sudut plumbum) tetapi juga mencipta ciri ciri tidak boleh halau belakang yang menjadikan motor pegang gear DC cacing tidak ternilai untuk aplikasi tanpa memerlukan beban kuasa. Motor gear DC cacing yang digunakan dalam penggerak injap, pintu penghantar atau mekanisme pengangkat akan memegang kedudukannya apabila kuasa dikeluarkan kerana cacing tidak boleh didorong ke belakang oleh roda cacing dalam keadaan beban biasa. Ciri mengunci diri ini menghapuskan keperluan untuk brek berasingan dalam banyak aplikasi, memudahkan reka bentuk sistem dan mengurangkan kos.
Motor DC gear heliks menggunakan gear dengan gigi bersudut yang terlibat secara beransur-ansur di sepanjang muka gigi, menghasilkan operasi yang lebih lancar dan lebih senyap daripada gear pacu pada kelajuan dan beban yang sama — pada kos premium yang sederhana. Kotak gear heliks sangat sesuai untuk aplikasi di mana bunyi menjadi kebimbangan utama, seperti peralatan perubatan, automasi pejabat dan peralatan pengguna. Kotak gear serong menggunakan gear berbentuk kon untuk menukar arah aci keluaran sebanyak 90 darjah berbanding aci motor — berguna di mana gerakan keluaran mestilah berserenjang dengan paksi motor kerana kekangan pemasangan. Gabungan serong-heliks menawarkan kedua-dua perubahan arah dan operasi lancar dan adalah perkara biasa dalam konfigurasi motor gear DC industri yang lebih tinggi.

Lembaran data motor gear DC membentangkan set parameter teknikal khusus yang mentakrifkan sampul prestasi peranti. Mentafsir ini dengan betul adalah penting untuk mengesahkan bahawa motor calon memenuhi keperluan aplikasi sebelum membeli.
| Parameter | Julat Biasa | Apa Yang Ditakrifkannya | Mengapa Ia Penting |
| Voltan Terkadar (V) | 3V – 48V DC | Voltan operasi nominal | Mesti sepadan dengan voltan bekalan kuasa |
| Kelajuan Tanpa Beban (RPM) | 1 – 500 RPM (output) | Kelajuan keluaran pada beban sifar | Had kelajuan atas pada voltan terkadar |
| Tork Dinilai (N·m) | 0.01 – 500 N·m | Tork keluaran selamat berterusan | Mesti melebihi tork beban aplikasi |
| Tork Gerai (N·m) | 2–10× tork berkadar | Tork maksimum pada kelajuan sifar | Kapasiti beban permulaan dan puncak |
| Nilai Semasa (A) | 0.1 – 50A | Arus pada tork dan kelajuan terkadar | Menentukan saiz bekalan kuasa |
| Nisbah Pengurangan Gear | 3:1 – 1000:1 | Faktor pengurangan kelajuan | Menetapkan kelajuan output dan pendaraban tork |
| Kecekapan Kotak Gear (%) | 50 – 95% | Kecekapan penghantaran kuasa mekanikal | Menjejaskan tork dan haba keluaran sebenar |
| Serangan balas (arcmin / darjah) | 0.5° – 5° tipikal | Hilang gerakan pada arah terbalik | Kritikal untuk ketepatan kedudukan |
Memilih motor gear DC dengan betul memerlukan kerja melalui set keperluan aplikasi yang sistematik dan memadankannya dengan spesifikasi motor yang tersedia. Tergesa-gesa proses ini atau memilih berdasarkan saiz fizikal sahaja adalah punca paling biasa kegagalan motor gear DC dalam projek kejuruteraan.
Mulakan dengan mengira tork dan kelajuan yang diperlukan pada aci keluaran motor gear untuk aplikasi khusus anda. Untuk beban berputar, tork dikira daripada daya yang diperlukan didarab dengan jarak lengan tuil (T = F × r). Untuk aplikasi mengangkat, tork bersamaan dengan berat beban yang didarab dengan jejari kili atau dram serta sebarang sumbangan geseran dan pecutan. Setelah anda mempunyai tork dan kelajuan keluaran yang diperlukan, kira nisbah pengurangan gear yang diperlukan berdasarkan voltan bekalan anda yang tersedia dan kelajuan motor biasa yang tersedia dalam motor gear DC bagi julat kuasa yang anda sasarkan. Tambahkan faktor keselamatan sekurang-kurangnya 1.5–2× pada tork yang diperlukan apabila memilih motor untuk memastikan margin yang mencukupi untuk inersia permulaan, variasi geseran dan variasi beban semasa operasi biasa.
Penarafan voltan motor gear DC menjangkau daripada 3V (untuk aplikasi berkuasa bateri kecil) melalui 6V, 12V, 24V dan 48V kepada voltan yang lebih tinggi untuk motor gear industri yang lebih besar. Voltan bekalan dalam sistem anda menentukan julat voltan motor yang sesuai. Untuk sistem berkuasa bateri, motor gear DC 12V adalah pilihan yang paling biasa disebabkan ketersediaan bateri 12V dan bekalan kuasa yang meluas; Motor gear DC 24V adalah standard dalam aplikasi perindustrian dan automasi di mana voltan yang lebih tinggi mengurangkan arus untuk kuasa yang setara, membolehkan tolok wayar yang lebih kecil dan kehilangan I²R yang lebih rendah dalam jangka masa kabel yang lebih lama. Kira keperluan kuasa (P = T × ω, dengan ω ialah halaju sudut dalam rad/s) dan sahkan bahawa bekalan kuasa boleh menghantar arus yang diperlukan pada voltan kendalian dengan ruang kepala yang mencukupi.
Padankan jenis kotak gear dengan permintaan khusus aplikasi anda dan bukannya lalai kepada mana-mana yang paling murah. Untuk robotik dan kedudukan ketepatan: kotak gear planet dengan tindak balas yang rendah. Untuk gerakan umum yang menjimatkan kos: kotak gear pacu. Untuk pegangan beban tanpa kuasa berterusan: kotak gear cacing. Untuk operasi senyap dalam persekitaran sensitif: kotak gear heliks. Untuk orientasi aci keluaran serenjang: kotak gear serong. Pertimbangkan kitaran tugas aplikasi — motor gear yang memacu penghantar tugas berterusan memerlukan penarafan haba untuk operasi yang berterusan, manakala motor yang digunakan untuk penggerak sekejap boleh beroperasi dengan selamat pada beban puncak yang lebih tinggi kerana masa penyejukan antara operasi.
Kekangan pemasangan fizikal, keadaan persekitaran dan keperluan antara muka semuanya mesti disahkan sebelum memuktamadkan pemilihan motor gear DC. Sahkan bahawa diameter, panjang dan dimensi aci keluaran serasi dengan komponen yang dipacu. Periksa dimensi muka pelekap motor dan corak bolt terhadap reka bentuk mekanikal anda. Jika motor gear akan beroperasi dalam persekitaran yang basah, berdebu atau agresif secara kimia, sahkan bahawa penarafan perlindungan IP motor dan kotak gear adalah sesuai — IP54 adalah memadai untuk kegunaan industri dalaman kalis percikan, manakala IP65 atau IP67 diperlukan untuk aplikasi luar atau cucian. Untuk pemprosesan makanan atau aplikasi farmaseutikal, perumah keluli tahan karat dan kotak gear yang dipenuhi pelincir gred makanan adalah keperluan pematuhan yang diperlukan.
Motor gear DC muncul dalam rangkaian produk dan sistem yang sangat luas, daripada peranti pengguna kecil kepada peralatan automasi industri berat. Memahami tempat dan cara ia digunakan menyediakan konteks yang berguna untuk mengenal pasti jenis dan spesifikasi produk yang paling sesuai untuk aplikasi baharu.
Salah satu kelebihan praktikal yang paling ketara bagi motor gear DC berbanding sistem motor AC ialah kesederhanaan dan fleksibiliti kawalan kelajuan dan arahnya. Pendekatan kawalan berbeza antara motor gear DC berus dan tanpa berus, dan memilih kaedah kawalan yang sesuai untuk aplikasi anda merupakan bahagian penting dalam reka bentuk sistem keseluruhan.
Modulasi lebar nadi (PWM) ialah kaedah standard dan paling cekap untuk mengawal kelajuan motor gear DC yang disikat. Daripada mengurangkan voltan motor secara langsung (yang membazirkan tenaga sebagai haba dalam perintang siri), PWM menggunakan voltan bekalan penuh kepada motor dalam denyutan pantas, mengubah kitaran tugas (perkadaran masa voltan digunakan) untuk mengawal penghantaran kuasa purata. Pada kitaran tugas 50%, motor menerima separuh voltan purata dan berjalan pada kira-kira separuh kelajuan; pada kitaran tugas 100% ia berjalan pada kelajuan penuh. IC pemacu motor moden (seperti L298N, DRV8833, TB6612FNG dan banyak lagi) melaksanakan litar jambatan H yang menyediakan kedua-dua kawalan kelajuan PWM dan kawalan arah (ke hadapan/terbalik) melalui isyarat logik mudah daripada mikropengawal, menjadikan kawalan kelajuan motor gear DC gelung tertutup boleh dicapai dengan perkakasan luaran yang minimum.
Motor gear DC tanpa berus memerlukan pengawal kelajuan elektronik (ESC) atau pemandu motor BLDC khusus yang menguruskan jujukan pertukaran berdasarkan maklum balas kedudukan rotor daripada penderia kesan Hall atau penderiaan EMF belakang. Pengawal ini mengendalikan pensuisan tiga fasa kompleks yang diperlukan untuk mengekalkan putaran berterusan dalam motor tanpa berus, mempersembahkan input rujukan kelajuan mudah (voltan analog, isyarat PWM atau komunikasi digital) kepada pengguna sambil menguruskan penggantian asas secara dalaman. Banyak pengawal motor BLDC moden juga menggabungkan algoritma kawalan berorientasikan medan (FOC) yang mengoptimumkan kecekapan motor, tindak balas tork dan prestasi kelajuan rendah — amat berharga untuk aplikasi servo robotik dan ketepatan yang memerlukan kawalan tork lebar jalur tinggi yang licin.
Motor gear DC adalah peranti penyelenggaraan yang agak rendah, tetapi penjagaan yang sesuai dan penyelesaian masalah sistematik memanjangkan hayat perkhidmatan dengan ketara dan mengelakkan kegagalan yang boleh dielakkan dalam aplikasi kritikal.
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *
Hak cipta © Zhejiang Dongzheng Motor Co., Ltd. Semua hak terpelihara.
 Pengilang Motor Gear DC
Pengilang Motor Gear DC