











Perundingan produk
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *


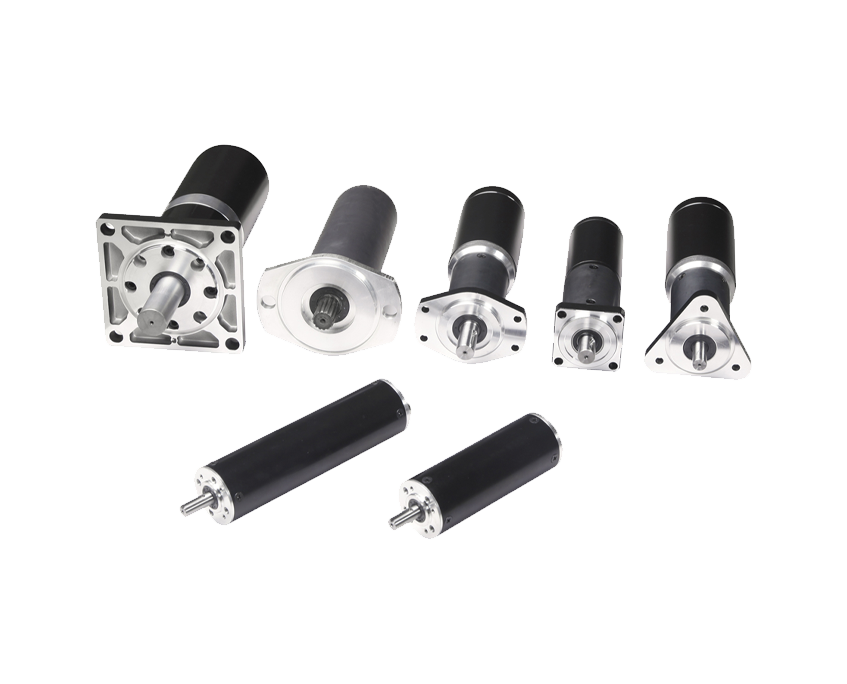
Motor gear BLDC menggabungkan dua komponen berbeza ke dalam unit pemacu bersepadu tunggal: motor DC tanpa berus dan kotak gear mekanikal yang dipasang terus ke aci keluarannya. Motor DC tanpa berus — selalunya dipanggil motor BLDC atau motor tanpa berus — menghasilkan gerakan putaran melalui medan magnet diubah suai secara elektronik dan bukannya sentuhan komutator berus fizikal yang digunakan dalam reka bentuk berus lama. Kotak gear yang dipasang kemudian menurunkan kelajuan putaran tinggi yang berciri tinggi kepada keluaran berkelajuan rendah dan tork lebih tinggi yang sesuai untuk tugas mekanikal dunia sebenar.
Perbezaan teras yang menetapkan Motor gear BLDC selain daripada motor gear berus adalah penghapusan pergantian mekanikal. Dalam motor tanpa berus, pemutar membawa magnet kekal manakala pemegun memegang belitan. Pengawal kelajuan elektronik (ESC) atau pemacu bersepadu memberi tenaga secara berurutan pada gegelung pemegun dalam pemasaan yang tepat, mewujudkan medan magnet berputar yang menarik pemutar magnet kekal ke sekeliling. Oleh kerana tiada berus fizikal bersentuhan dengan pemasangan berputar, tiada kehausan berus, tiada arka, dan tiada pencemaran habuk karbon — tiga mod kegagalan utama motor berus tiada langsung.
Seni bina ini diterjemahkan kepada motor yang pada asasnya lebih cekap, tahan lama dan lebih senyap daripada yang setara dengannya. Apabila dipasangkan dengan kotak gear ketepatan, hasilnya ialah penggerak berprestasi tinggi yang padat sesuai untuk aplikasi industri dan komersil tugas berterusan di mana masa henti akibat penyelenggaraan adalah mahal dan kebolehpercayaan tidak boleh dirunding.
Memahami pembinaan dalaman motor gear BLDC membantu jurutera dan pembeli membuat keputusan pemilihan yang lebih baik dan menjangka keperluan penyelenggaraan dengan tepat. Perhimpunan ini terdiri daripada beberapa subsistem bersepadu, setiap satunya mempengaruhi prestasi keseluruhan dengan cara tertentu.
Motor BLDC yang digunakan dalam motor gear biasanya dibina dalam konfigurasi pemutar dalam, di mana pemutar magnet kekal terletak di dalam belitan pemegun. Reka bentuk ini berputar pada RPM tinggi dengan inersia rotor yang agak rendah, menjadikannya sesuai untuk dipasangkan dengan kotak gear yang akan mengendalikan pendaraban tork. Reka bentuk pemutar luar (atau pelari luar) meletakkan pemasangan magnet di bahagian luar pemegun dan digunakan dalam aplikasi di mana ketumpatan tork pemacu langsung menjadi keutamaan — seperti pendorong dron atau motor hab — tetapi kurang biasa dalam pakej motor gear bersepadu kerana cabaran geometri untuk memasang kotak gear pada cangkang luar yang berputar.
Untuk menukar dengan betul, pemandu perlu mengetahui kedudukan sudut rotor pada setiap masa. Kebanyakan motor gear BLDC perindustrian termasuk tiga penderia kesan Hall yang tertanam dalam stator, diletakkan 120 darjah di antara satu sama lain. Penderia ini mengesan kutub magnet pemutar yang lalu dan memberi isyarat kedudukan kepada pengawal, membolehkan pertukaran yang tepat dan lancar dari permulaan hingga kelajuan penuh. Sesetengah reka bentuk menggunakan komutasi tanpa sensor, yang menganggarkan kedudukan rotor daripada isyarat EMF belakang dalam belitan yang tidak bertenaga. Sistem tanpa sensor adalah lebih ringan dan lebih murah tetapi berjuang pada kelajuan yang sangat rendah dan semasa permulaan, di mana back-EMF terlalu lemah untuk dibaca dengan pasti. Untuk kebanyakan aplikasi gearmotor yang bermula di bawah beban, Maklum balas penderia dewan adalah pilihan yang diutamakan dan lebih dipercayai .
Kotak gear yang dipasang pada motor DC tanpa berus dipilih berdasarkan tork output, julat kelajuan, keperluan kecekapan, dan kekangan ruang fizikal aplikasi. Tiga jenis menguasai pasaran gearmotor BLDC:
Daya tarikan motor gear BLDC dalam reka bentuk mesin moden bukan semata-mata mengikut arah aliran teknologi — ia berasaskan kepada kelebihan prestasi yang boleh diukur dan berkaitan dengan aplikasi berbanding kedua-dua motor gear berus dan motor aruhan AC dalam kelas kuasa yang setara.
| Faktor Prestasi | Motor Gear BLDC | Motor Gear Berus | Motor Gear Aruhan AC |
|---|---|---|---|
| Kecekapan | 85–95% | 60–85% | 70–90% |
| Kawalan Kelajuan | Cemerlang (julat 0–100%) | Baik (berasaskan PWM) | Terhad (memerlukan VFD) |
| Penyelenggaraan | Minimum (bearing-had) | Penggantian berus biasa | Rendah (terhad galas) |
| Ketumpatan Kuasa | tinggi | Sederhana | Rendah–Sederhana |
| Tork Kelajuan Rendah | Cemerlang | bagus | Miskin tanpa VFD |
| EMI / Bunyi bising | rendah | tinggier (brush arcing) | rendah |
| Kos Unit | Sederhana–High | rendah | Rendah–Sederhana |
Kelebihan kecekapan motor gear tanpa berus adalah paling memberi kesan dalam sistem berkuasa bateri, di mana setiap titik peratusan kecekapan secara langsung diterjemahkan kepada masa berjalan yang lebih lama. AGV yang menjalankan syif 16 jam pada pek bateri akan menyaksikan peningkatan operasi yang ketara dengan beralih daripada pemanduan berus kepada tanpa berus — bukan sahaja dalam penjimatan tenaga tetapi dalam pengurangan haba motor, yang juga mengurangkan tekanan haba pada elektronik bersebelahan dan pelincir kotak gear.
Julat kawalan kelajuan yang luas adalah sama penting. Motor gear BLDC boleh diarahkan untuk berjalan lancar pada 5% daripada kelajuan terkadarnya atau 100%, dengan penghantaran tork yang konsisten sepanjang masa. Motor berus kehilangan kestabilan tork pada kitaran tugas yang sangat rendah, dan motor aruhan AC yang dikendalikan tanpa pemacu frekuensi berubah pada dasarnya adalah peranti berkelajuan tetap. Fleksibiliti ini menjadikan motor gear tanpa berus amat berharga dalam aplikasi di mana pemprosesan atau kelajuan proses perlu berbeza-beza secara dinamik.

Motor gear DC tanpa berus muncul di pelbagai industri yang sangat luas. Perkara yang dikongsi oleh kebanyakan aplikasi ini ialah permintaan untuk saiz padat, operasi berterusan yang boleh dipercayai, kelajuan berubah-ubah dan penyelenggaraan yang rendah — kekuatan teknologi yang menentukan.
AGV, robot mudah alih autonomi (AMR) dan platform robot kolaboratif (cobot) adalah antara segmen pertumbuhan terbesar untuk motor gear planet BLDC. Sistem ini memerlukan kawalan kelajuan yang tepat untuk navigasi yang lancar, tork puncak yang tinggi untuk memulakan di bawah beban penuh dan tanjakan memanjat, hayat operasi yang panjang antara hentian penyelenggaraan, dan pembungkusan padat untuk dimuatkan dalam reka bentuk casis yang ketat. Pacuan roda AGV biasa menggunakan a Motor gear planet 24V atau 48V BLDC dalam julat 100–500W, dengan nisbah gear 10:1 hingga 50:1 bergantung pada diameter roda dan kelajuan perjalanan sasaran. Pengekod bersepadu pada data kedudukan suapan aci motor kembali ke pengawal navigasi untuk odometri.
Pusat pemenuhan e-dagang moden dan barisan pembuatan bergantung pada sistem penghantar kelajuan berubah-ubah untuk mengukur aliran produk, menyegerakkan proses huluan dan hiliran serta mengendalikan item yang rapuh dengan lembut. Motor gear BLDC dalam sistem ini menggantikan motor aruhan AC dan kotak gear yang lebih lama kerana ia boleh dikawal kelajuan secara individu tanpa VFD di setiap titik pemacu, mengurangkan kerumitan kabinet kawalan dan kos pada skala. Sistem penghantar penggelek selalunya membenamkan motor gear tanpa berus 24V atau 48V kecil terus di dalam penggelek yang digerakkan — konfigurasi yang dipanggil penggelek pemacu bermotor — untuk mencipta susun atur zon penghantar yang diedarkan sepenuhnya dan boleh dikawal secara individu.
Robot pembedahan, pam infusi, platform automasi makmal dan instrumen diagnostik memerlukan motor yang tidak menghasilkan pencemaran zarah (menolak berus), beroperasi dengan senyap, menyampaikan gerakan yang tepat dan boleh berulang, dan mengekalkan prestasi yang konsisten selama bertahun-tahun operasi berterusan. Motor gear BLDC — terutamanya dalam saiz bingkai kompak 22–57mm dengan kotak gear planet ketepatan — ialah pilihan penggerak yang dominan dalam sektor ini. Output EMI rendah mereka juga penting dalam persekitaran di mana elektronik pengukuran sensitif beroperasi berdekatan.
Motor basikal elektrik pacuan tengah pada asasnya ialah motor gear BLDC berprestasi tinggi yang dioptimumkan untuk input dan output kuasa skala manusia. Mereka menggunakan peringkat pengurangan planet dalaman untuk memberikan tork yang licin kepada pacuan sambil membenarkan motor berputar dalam julat RPM yang cekap tanpa mengira rupa bumi. Begitu juga, skuter elektrik dan kenderaan utiliti ringan menggunakan motor hab BLDC dengan penggearan pengurangan dalaman untuk memaksimumkan tork pada kelajuan roda rendah tanpa mengorbankan kecekapan motor pada kelajuan pelayaran. Ketiadaan penyelenggaraan berus dalam produk pengguna ini merupakan kelebihan kebolehpercayaan utama untuk produk yang dijual ke pasaran di mana pengguna akhir tidak mempunyai keupayaan perkhidmatan mekanikal.
Bidai bermotor, sistem tirai pintar, penggerak peredam HVAC dan pembuka pintu automatik semakin banyak menggunakan motor gear BLDC padat berbanding motor segerak AC yang mendominasi kategori ini sebelum ini. Keupayaan untuk beroperasi pada bekalan DC voltan rendah (12V atau 24V), mengawal kedudukan dan kelajuan dengan tepat, dan disepadukan dengan mudah dengan platform rumah pintar berasaskan mikropengawal menjadikan motor gear tanpa berus sesuai semula jadi untuk sistem bangunan yang disambungkan. Operasi senyap mereka juga merupakan kelebihan pengalaman pengguna yang bermakna dalam tetapan kediaman.
Memilih motor gear DC tanpa berus melibatkan kerja melalui satu siri parameter yang saling bergantung. Tersilap mana-mana satu daripadanya — terutamanya tork atau rating terma — boleh mengakibatkan motor gagal pramatang atau kurang prestasi dari hari pertama. Proses pemilihan harus mengikut urutan logik daripada analisis beban kepada keserasian pemandu.
Mulakan dengan keperluan aci keluaran: apakah tork yang diminta oleh beban, pada kelajuan berapa, dan dengan kitaran tugas apa? Kira daya kilas keluaran yang diperlukan daripada prinsip pertama — mengambil kira daya yang diperlukan untuk menggerakkan beban, jejari lengan atau pacuan momen, kehilangan geseran dan sebarang tork pecutan yang diperlukan untuk permulaan pantas. Sentiasa gunakan faktor servis 1.5–2× pada tork yang dikira untuk mengambil kira variasi dunia sebenar, puncak inersia permulaan dan ketidakpastian beban. Kemudian tentukan kelajuan keluaran yang diperlukan. Kedua-dua nilai ini — tork keluaran dan kelajuan keluaran — mentakrifkan titik operasi mekanikal yang mesti dipenuhi oleh motor gear.
Bahagikan kelajuan tanpa beban dinilai motor dengan kelajuan keluaran yang diperlukan untuk mendapatkan nisbah gear sasaran. Sebagai contoh, jika motor berjalan pada 4,000 RPM dan aplikasi memerlukan 80 RPM pada aci keluaran, nisbah sasaran ialah 50:1. Sahkan bahawa kotak gear boleh menghantar tork keluaran pada nisbah tersebut — kotak gear planet 50:1 yang dipasang pada motor yang menghasilkan 0.15 N·m harus memberikan kira-kira 7.5 N·m pada output (0.15 × 50 × kecekapan kotak gear ~0.92 ≈ 6.9 N·m). Rujukan silang ini terhadap tork keluaran berterusan dinilai kotak gear untuk mengesahkan margin yang mencukupi.
Motor yang dinilai untuk keluaran kuasa berterusan yang diberikan menganggap pelesapan haba yang mencukupi. Dalam aplikasi tugas terputus-putus — di mana motor bermula dan berhenti berulang kali — motor mungkin boleh mengendalikan beban puncak yang lebih tinggi daripada yang dicadangkan oleh penarafan berterusannya, selagi setiap tempoh aktif cukup singkat untuk motor menyejuk antara kitaran. Untuk aplikasi tugas berterusan (berjalan lebih daripada 60% daripada masa), tork berterusan yang diberi nilai dan angka kuasa tidak boleh melebihi. Sentiasa periksa penarafan kelas terma motor (Kelas B = 130°C, Kelas F = 155°C, Kelas H = 180°C) berbanding dengan suhu operasi ambien anda.
Motor gear BLDC tersedia dalam kelas voltan standard — biasanya 12V, 24V, 36V, 48V dan lebih tinggi untuk unit industri. Pilih voltan yang sejajar dengan seni bina kuasa sedia ada anda. Voltan yang lebih tinggi membolehkan lebih banyak kuasa pada arus yang lebih rendah, yang mengurangkan kehilangan kabel dan haba pemacu, tetapi memerlukan transistor pemacu yang lebih mahal dan penebat yang lebih baik. Sahkan bahawa pemacu yang serasi atau pengawal bersepadu wujud untuk motor, termasuk sokongan untuk peranti maklum balas (Penderia Hall, pengekod) dan antara muka kawalan (PWM, analog, bas CAN, RS-485 atau EtherCAT) yang digunakan dalam sistem anda.
Segmen yang semakin berkembang dalam pasaran motor gear BLDC terdiri daripada modul motor gear pintar bersepadu sepenuhnya — unit di mana motor tanpa berus, kotak gear, pengekod dan elektronik pemandu semuanya ditempatkan dalam satu pemasangan padat. Motor gear tanpa berus bersepadu ini mengurangkan kerumitan reka bentuk sistem dengan ketara dengan menghapuskan pemandu motor yang berasingan, abah-abah pendawaian antara pemandu dan motor, dan keperluan untuk menala parameter pertukaran untuk pasangan pemandu motor tertentu.
Unit bersepadu biasanya berkomunikasi melalui antara muka bas digital seperti bas CAN, RS-485 dengan protokol Modbus, atau varian Ethernet industri seperti EtherCAT. PLC atau pengawal gerakan menghantar arahan kelajuan, tork atau kedudukan ke atas bas, dan pemandu bersepadu mengendalikan semua penukaran peringkat rendah, kawalan semasa dan pemprosesan maklum balas secara dalaman. Seni bina ini amat cekap dalam mesin berbilang paksi — sistem penghantar dengan 20 titik pemacu dikawal secara individu, contohnya, boleh dirangkaikan bersama pada rantai daisy RS-485 tunggal dan bukannya memerlukan 20 sambungan kabel berasingan ke kabinet kawalan pusat.
Apabila menilai modul motor gear BLDC bersepadu, periksa sama ada pengawal terbina dalam menyokong brek penjanaan semula (memberi tenaga kinetik kembali ke dalam bas bekalan semasa nyahpecutan), perlindungan suhu berlebihan dan arus lebih, dan keuntungan PID yang boleh dikonfigurasikan perisian. Unit terbaik mendedahkan set parameter penuh melalui perisian konfigurasi, membolehkan jurutera menala lebar jalur gelung kelajuan, kadar tanjakan pecutan dan tingkah laku tindak balas kerosakan tanpa mengubah perkakasan.
Walaupun motor gear tanpa berus memerlukan penyelenggaraan rutin yang jauh lebih sedikit daripada yang setara dengannya, ia tidak benar-benar bebas penyelenggaraan. Pemasangan yang betul dan pemeriksaan berkala memanjangkan hayat perkhidmatan dengan ketara dan menghalang mod kegagalan yang paling biasa.
Salah jajaran antara aci keluaran motor gear dan beban yang didorong adalah salah satu punca utama kegagalan galas pramatang. Malah penjajaran sudut atau selari yang kecil mencipta daya jejari kitaran pada galas aci keluaran yang, selama berjuta-juta putaran, menyebabkan kegagalan keletihan jauh lebih awal daripada jangka hayat bearing itu. Gunakan gandingan aci fleksibel untuk menampung salah jajaran kecil di mana gandingan langsung diperlukan, dan sahkan keselarian dengan penunjuk dail semasa pemasangan. Untuk pemacu tali pinggang atau rantai, pastikan ketegangan berada dalam spesifikasi beban terlempang yang dinilai oleh kotak gear — beban lampau yang berlebihan daripada tali pinggang yang terlalu ketat adalah satu lagi punca biasa kegagalan galas awal.
Kotak gear planet ketepatan dipenuhi kilang dengan gris sintetik berkualiti tinggi dan biasanya dinilai sebagai pelincir seumur hidup untuk keadaan operasi biasa. Walau bagaimanapun, dalam persekitaran kitaran tinggi, beban tinggi atau suhu tinggi, gris merosot dari semasa ke semasa dan harus diganti pada selang waktu tertentu — biasanya setiap 5,000–10,000 jam atau seperti yang ditentukan oleh pengilang. Kotak gear cacing memerlukan pelinciran minyak dan mempunyai selang pelinciran semula yang lebih pendek kerana sifat sentuhan gelongsor jaringan gear cacing. Sentiasa gunakan gred pelincir yang ditentukan oleh pengilang; menggantikan jenis gris yang tidak serasi boleh menyebabkan interaksi aditif dan kehausan dipercepatkan.
Alamat e -mel anda tidak akan diterbitkan. Bidang yang diperlukan ditandakan *
Hak cipta © Zhejiang Dongzheng Motor Co., Ltd. Semua hak terpelihara.
 Pengilang Motor Gear DC
Pengilang Motor Gear DC